- @iWZXQxBO
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
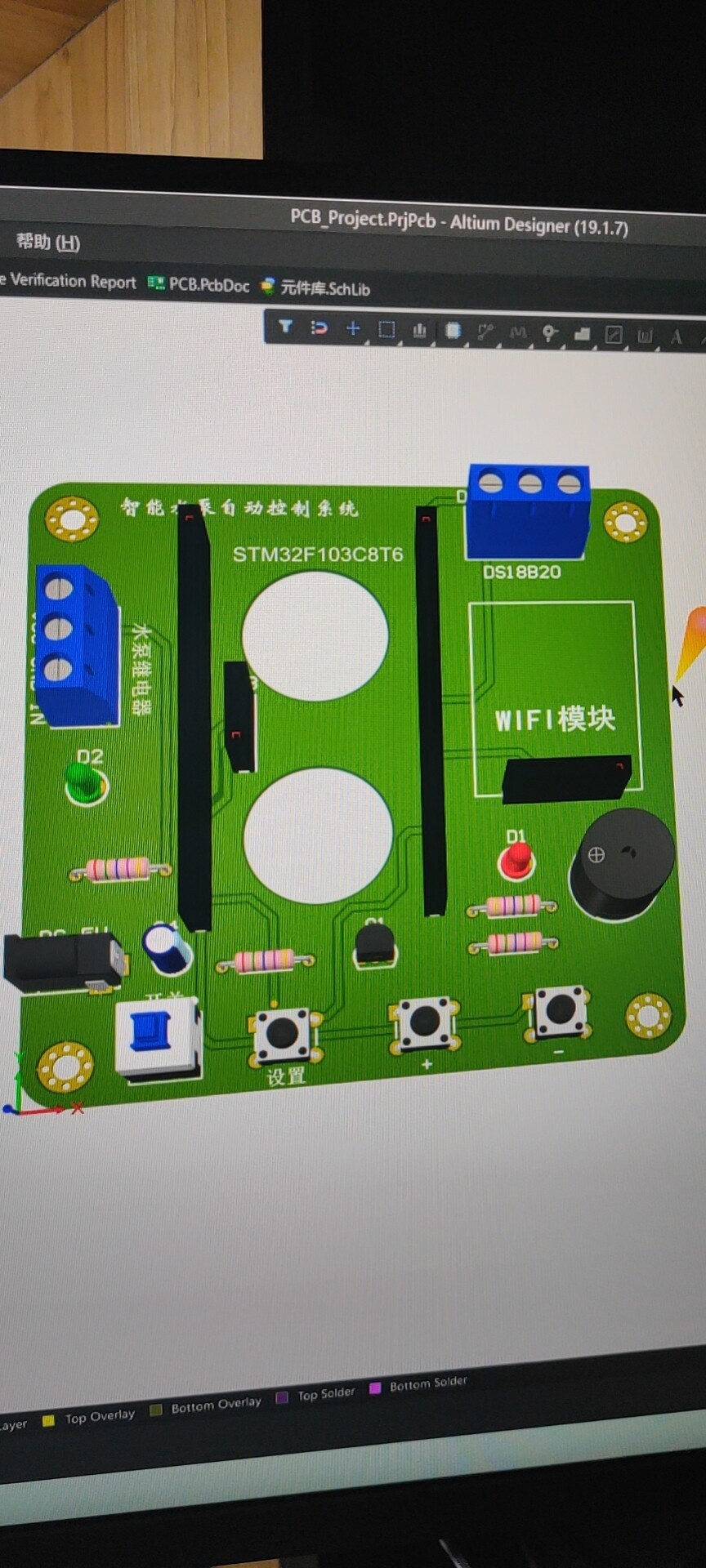
先上干货,整个系统用STM32F103C8T6当大脑,超声波测水位,DS18B20测水温,继电器控制水泵。今天带大家用STM32搞个全自动水位水温控制系统,手机点两下就能远程管理,连阿里云都接上了,卷死隔壁用机械浮球的老王!实测发现继电器物理延迟有0.5秒,所以在逻辑判断里加了软件去抖,比硬件RC电路更省钱。支持: 水位检测、水温检测、水泵控制、水温水位数据分析、已连接阿里云服务器、有手机端APP
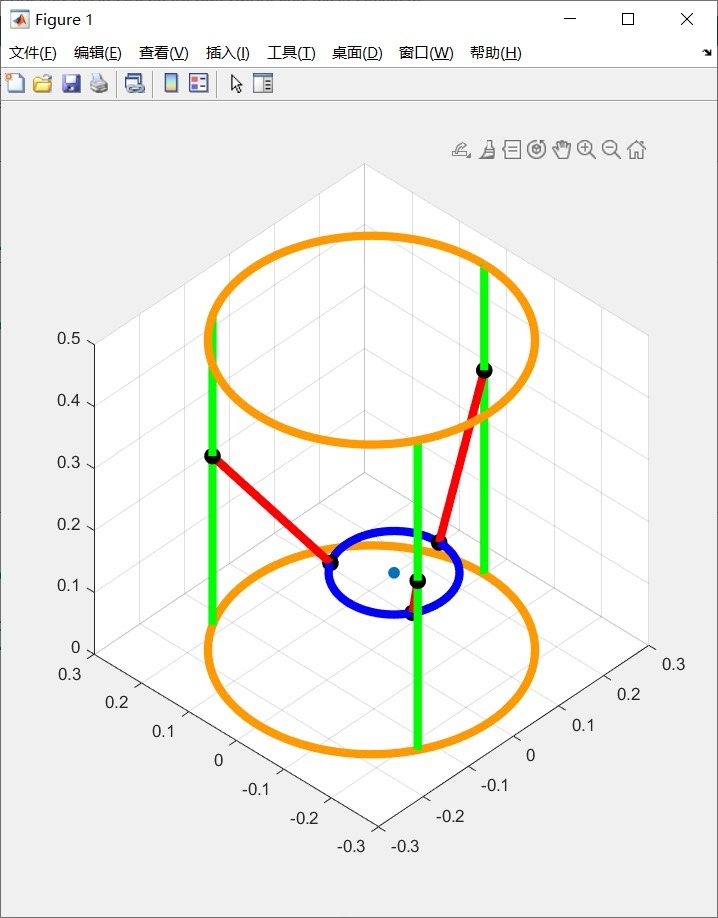
MATLAB线性delta并联机器人仿真正逆运动学,直线三角洲delta并联机器人在机器人领域,Delta并联机器人因其独特的结构和良好的运动性能,在分拣、包装等诸多行业有着广泛应用。今天咱就来聊聊基于MATLAB对直线三角洲Delta并联机器人进行正逆运动学仿真这一有趣的话题。
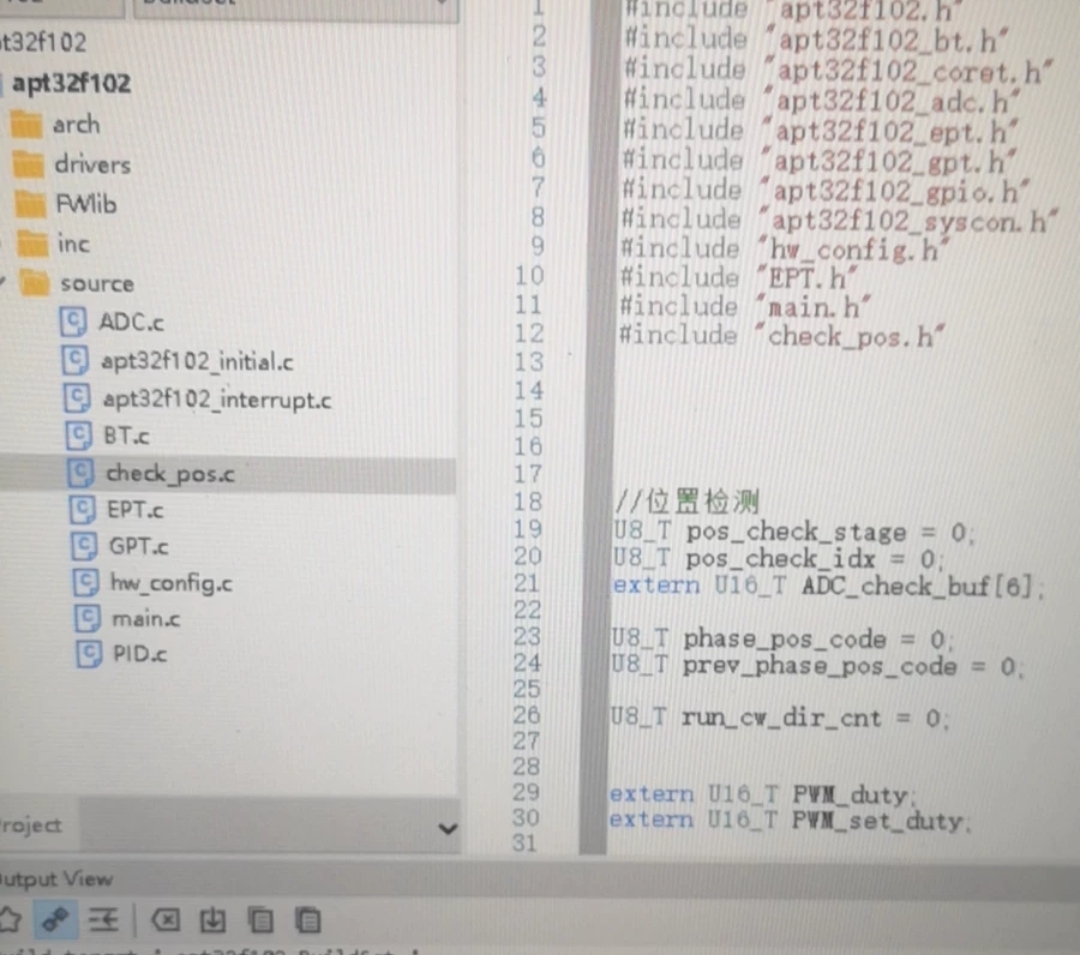
先看硬件配置,APT32F1023这颗国产MCU真香——72MHz主频带硬件乘除法器,6路PWM互补输出自带死区控制,关键是有个16位高精度ADC。这套方案跑起来后,实测效率比之前用的STM32方案高了3%,看来APT32F1023的PWM死区控制确实精准。最后提醒下PCB布局:高压部分和信号地要分区域布局,MOS驱动信号走线尽量等长,软件上做好过流保护,别问我怎么知道的(烟雾报警器响了两次...
这种隐形的经济性判断,是传统优化算法很难捕捉到的。为此,提出双深度期望Q网络算法,通过考虑状态转移的随机性,优化一般深度Q网络算法的Q迭代规则,显著提高算法的收敛速度。为此,提出双深度期望Q网络算法,通过考虑状态转移的随机性,优化一般深度Q网络算法的Q迭代规则,显著提高算法的收敛速度。内容:随着光伏发电在微电网中的渗透率不断提高,其发电出力的不确定性和时变性为微电网的经济运行带来了挑战。内容:随着
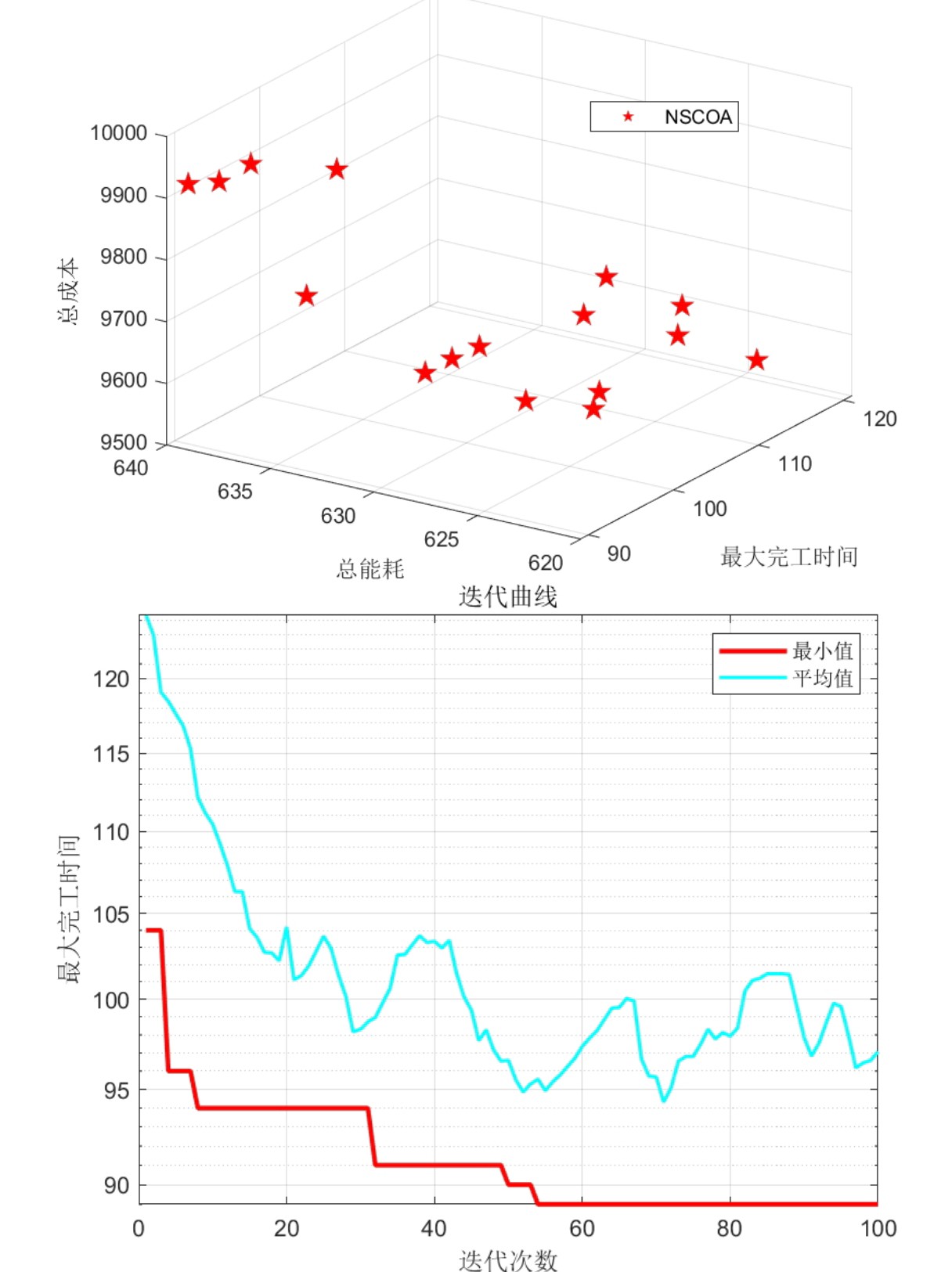
基于非支配排序的多目标小龙虾优化算法求解柔性作业车间调度问题FJSP(MATLAB代码)在优化领域,柔性作业车间调度问题(FJSP)一直是个热门且极具挑战的议题。FJSP 涉及到多个工件在多个机器上的加工,每个工件有多道工序,每道工序又可能有多种可选机器,目标是在满足各种约束条件下,优化多个性能指标,比如最小化完工时间、最小化机器负荷等。今天咱来聊聊用基于非支配排序的多目标小龙虾优化算法来解决 F
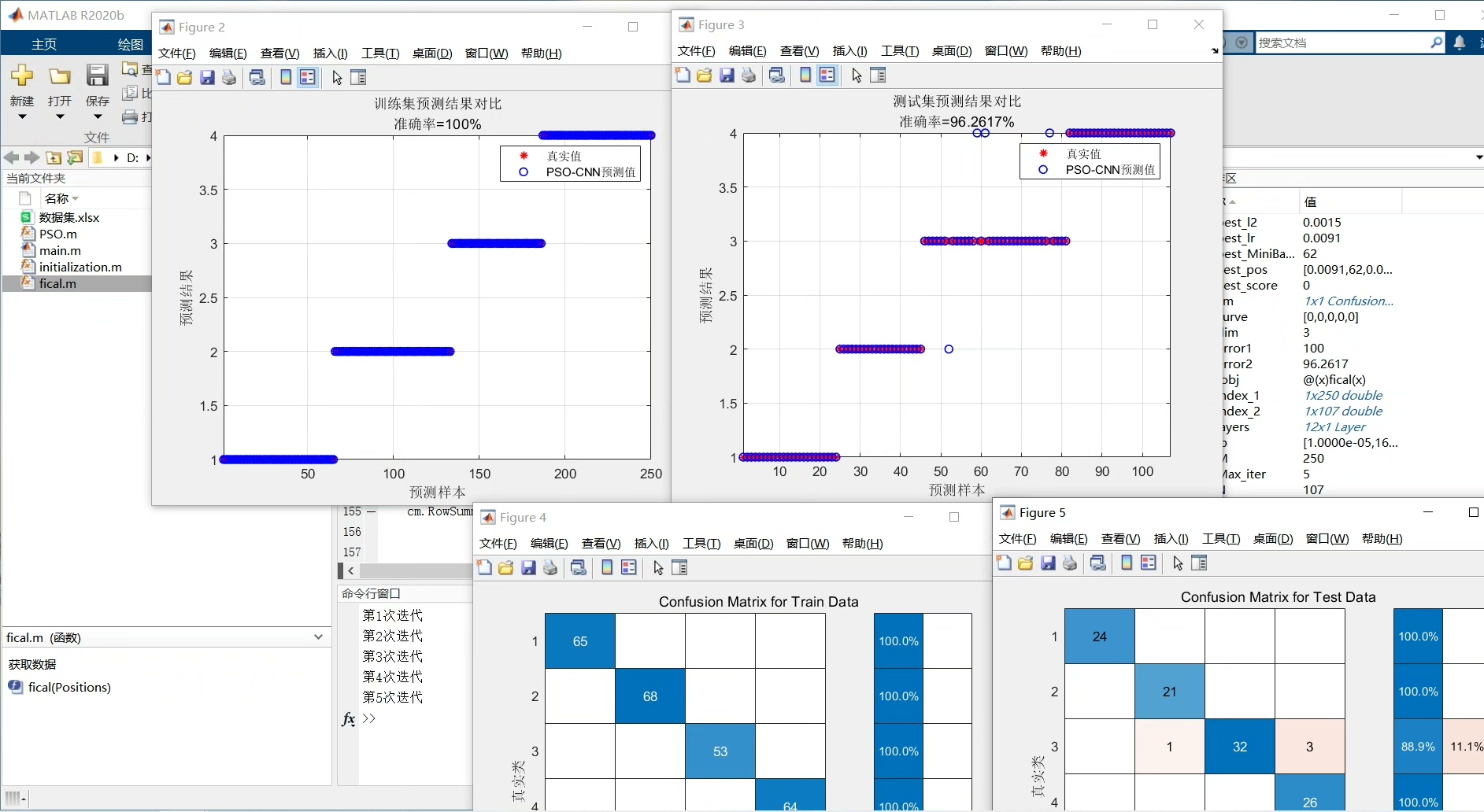
PSO-CNN粒子群算法(PSO)优化卷积神经网络CNN分类预测,PSO-CNN分类预测,多输入单输出模型。多特征输入单输出的二分类及多分类模型,迭代优化图,混淆矩阵图。深度学习算法近年来在模式识别、图像分类等领域取得了巨大的成功。卷积神经网络(CNN)作为一种经典的深度学习算法,已经被广泛应用于图像分类、目标检测等任务中。然而,传统的CNN在处理复杂任务时,往往需要大量的标注数据和计算资源,难以
最后提醒新手容易踩的坑:生化池的污泥浓度计记得做定期校准,有次半夜报警把值班电工整懵了,结果发现是探头挂上塑料袋了。调试时发现PID参数整定要跟着进水负荷变化走,后来做了个分时段参数表,早中晚用不同参数,比固定参数效果强多了。117-西门子1200PLC博途污水处理控制KTP1200触摸屏画面,污水处理厂程序例程,博图版本V16。117-西门子1200PLC博途污水处理控制KTP1200触摸屏画面
特别是低速段(10%额定转速以下),电流谐波含量降低了15dB,这个提升在带编码器的场合可能不明显,但在无感控制中就是质的飞跃。基于扰动观测器的永磁同步电机(PMSM)模型预测控制(MPC)仿真,速度外环基于模型预测控制、电流内环基于无差拍控制搭建,控制效果理想,模块程序设计通俗易通,送参考文献,方便学习理解。基于扰动观测器的永磁同步电机(PMSM)模型预测控制(MPC)仿真,速度外环基于模型预测
最近折腾了一个基于51单片机的俄罗斯方块游戏机项目,感觉挺有意思,就来跟大家分享分享。这个项目不仅实现了经典俄罗斯方块游戏的基本功能,还能通过Protues进行仿真验证,对于学习51单片机的小伙伴来说,是个不错的练手项目。
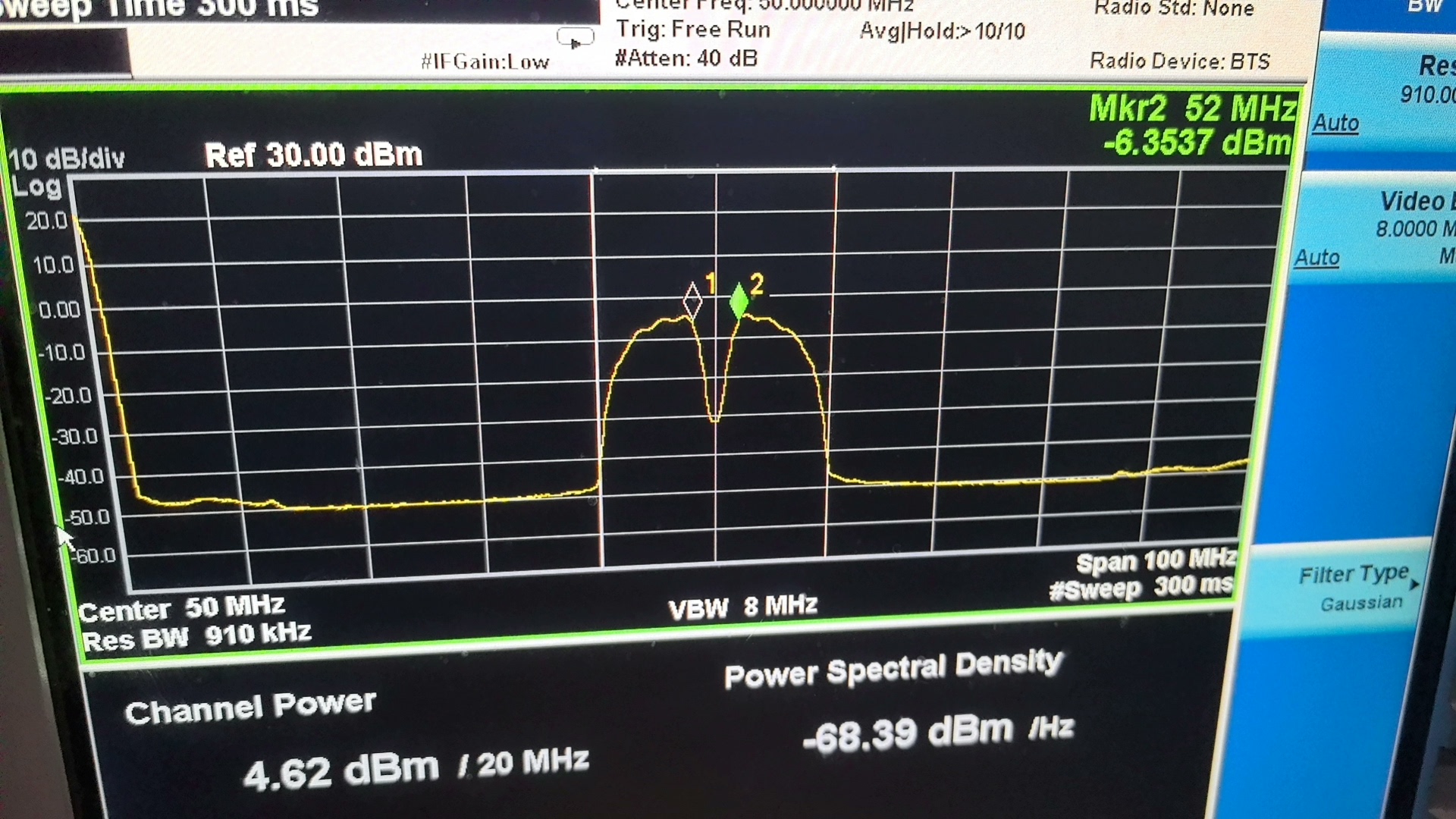
射频电路方案设计以及硬件实现包括收发机,频率源等在现代通信领域,射频电路如同隐藏在幕后的魔法大师,默默支撑着各种无线设备的高效运行。今天,咱们就来深入探讨一下射频电路方案设计以及硬件实现,特别是其中关键的收发机与频率源部分。