
基于非支配排序的多目标小龙虾优化算法求解FJSP
基于非支配排序的多目标小龙虾优化算法求解柔性作业车间调度问题FJSP(MATLAB代码) https://mbd.pub/o/bread/mbd-ZZ2Wlp9x
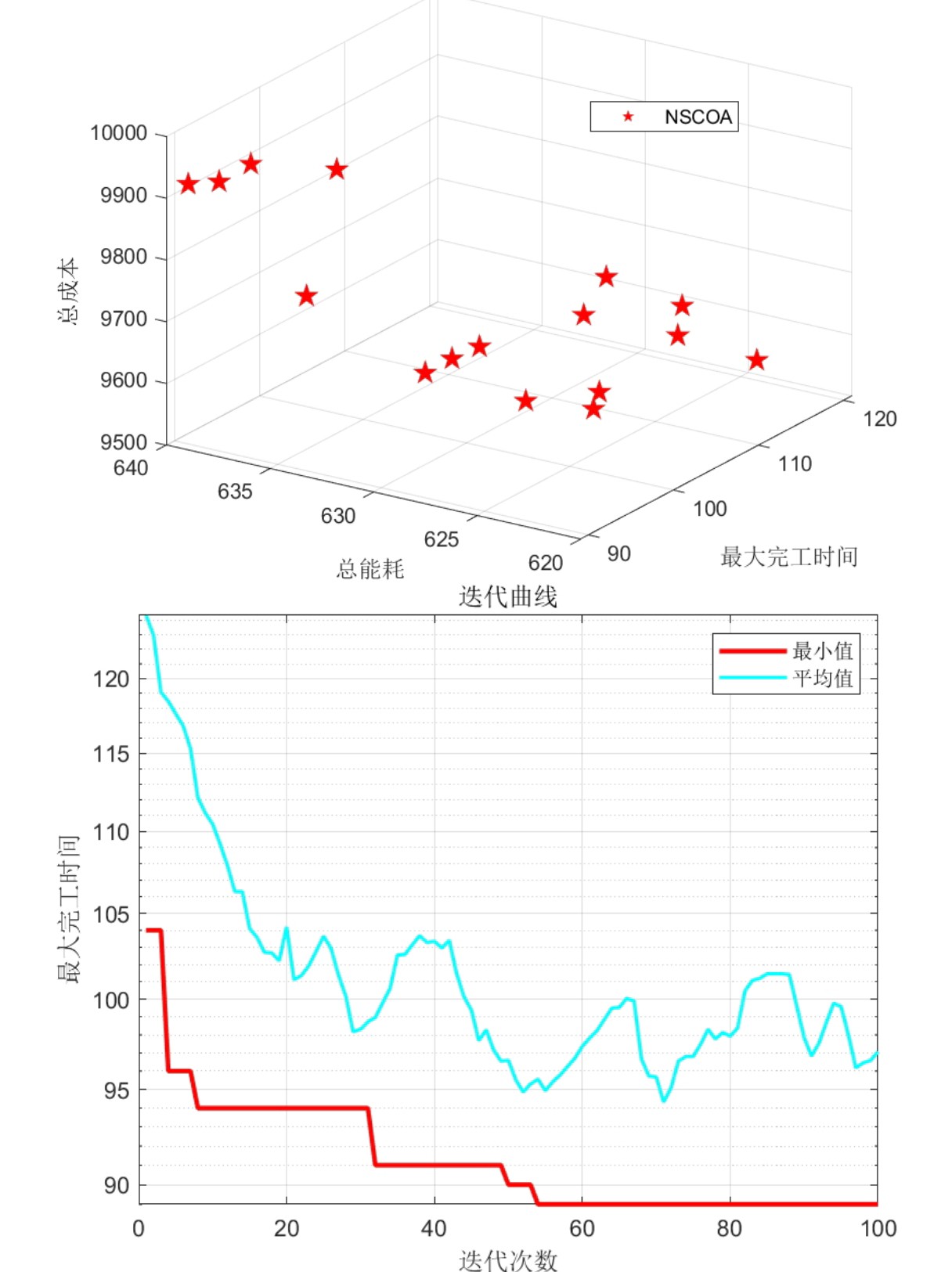
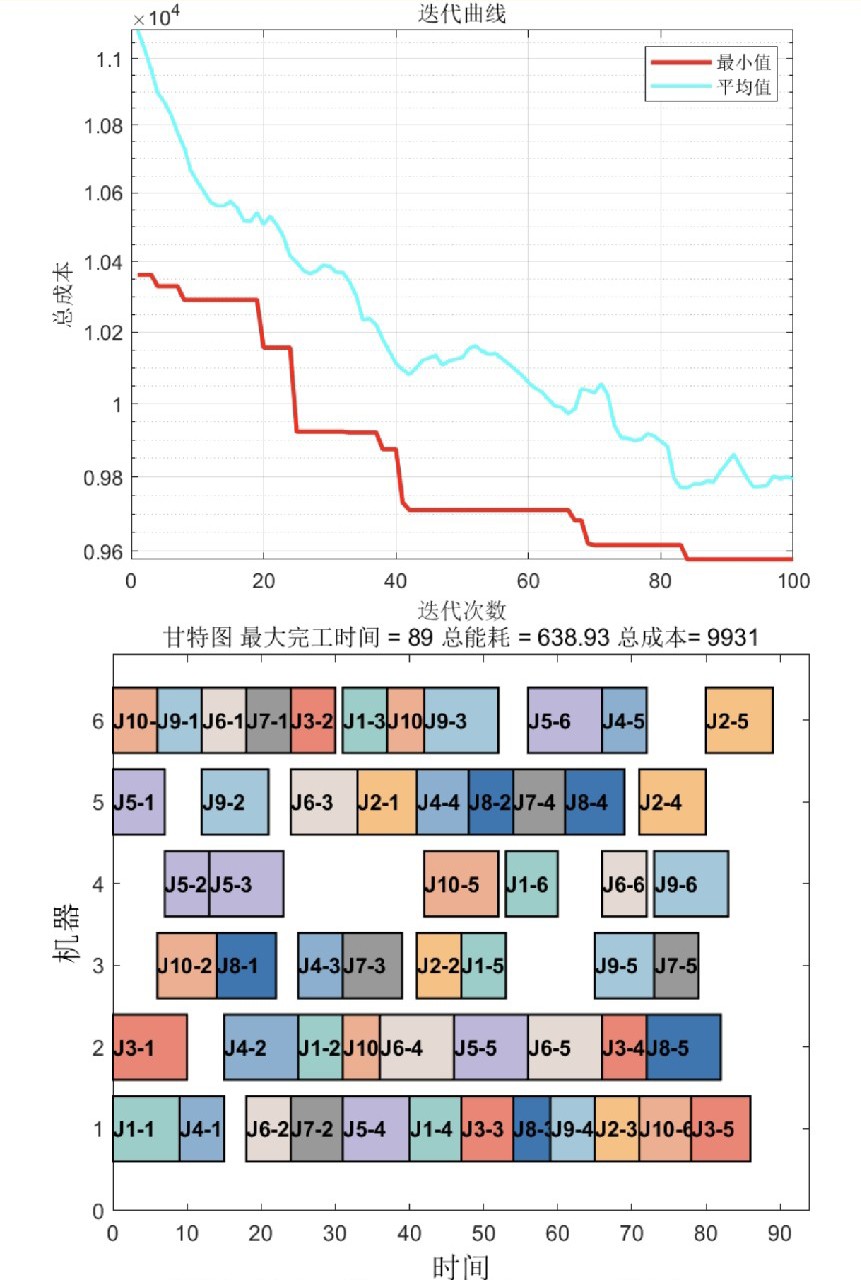
在优化领域,柔性作业车间调度问题(FJSP)一直是个热门且极具挑战的议题。FJSP 涉及到多个工件在多个机器上的加工,每个工件有多道工序,每道工序又可能有多种可选机器,目标是在满足各种约束条件下,优化多个性能指标,比如最小化完工时间、最小化机器负荷等。
今天咱来聊聊用基于非支配排序的多目标小龙虾优化算法来解决 FJSP,并且搭配 MATLAB 代码实战。
非支配排序与多目标小龙虾优化算法
非支配排序在多目标优化中起着关键作用。它将种群中的个体根据目标函数值进行排序,划分成不同的非支配层。处于较低非支配层的个体,在所有目标上都不劣于较高层的个体。
基于非支配排序的多目标小龙虾优化算法求解柔性作业车间调度问题FJSP(MATLAB代码) https://mbd.pub/o/bread/mbd-ZZ2Wlp9x
多目标小龙虾优化算法则是模拟小龙虾的觅食、移动等行为。小龙虾个体在解空间中移动,通过相互影响、协作来搜索更优解。结合非支配排序后,能在多个目标之间找到较好的权衡。
MATLAB 代码实战
初始化部分
% 定义机器数量、工件数量等参数
numMachines = 5;
numJobs = 3;
% 初始化工件工序和机器可选情况
processes = cell(numJobs,1);
for i = 1:numJobs
numProcesses = randi([3, 5]); % 每个工件工序数量随机
machines = cell(numProcesses,1);
for j = 1:numProcesses
numOptions = randi([1, numMachines]); % 每道工序可选机器数量随机
machines{j} = randperm(numMachines, numOptions);
end
processes{i} = machines;
end这部分代码先设定了机器和工件的数量,然后通过循环随机生成每个工件的工序数量以及每道工序可选的机器。这样就构建了一个简单的 FJSP 场景。
目标函数计算
function [makespan, load] = calculateObjectives(solution, processes, numMachines)
% 初始化机器加工时间
machineTimes = zeros(numMachines, 1);
% 遍历每个工件工序
for i = 1:length(solution)
job = solution(i).job;
process = solution(i).process;
machine = solution(i).machine;
% 假设每个工序加工时间随机
processingTime = randi([1, 10]);
% 计算完工时间
start = max(machineTimes(machine), solution(i - 1).finishTime);
finishTime = start + processingTime;
solution(i).finishTime = finishTime;
machineTimes(machine) = finishTime;
end
makespan = max(machineTimes);
% 计算机器负荷
load = sum(machineTimes)/numMachines;
end这个函数接受一个调度方案(solution)、工序信息(processes)和机器数量,计算两个目标值:完工时间(makespan)和机器平均负荷(load)。它先初始化机器加工时间,然后遍历调度方案中的每一个工序,计算每个工序的开始时间和结束时间,最后得出完工时间和机器负荷。
非支配排序函数
function fronts = fastNonDominatedSort(population, processes, numMachines)
S = cell(length(population), 1);
n = zeros(length(population), 1);
fronts{1} = [];
for i = 1:length(population)
S{i} = [];
n(i) = 0;
for j = 1:length(population)
if i ~= j
[obj1, ~] = calculateObjectives(population{i}, processes, numMachines);
[obj2, ~] = calculateObjectives(population{j}, processes, numMachines);
if dominates(obj1, obj2)
S{i} = [S{i}, j];
elseif dominates(obj2, obj1)
n(i) = n(i) + 1;
end
end
end
if n(i) == 0
fronts{1} = [fronts{1}, i];
end
end
i = 1;
while ~isempty(fronts{i})
Q = [];
for p = fronts{i}
for q = S{p}
n(q) = n(q) - 1;
if n(q) == 0
Q = [Q, q];
end
end
end
i = i + 1;
fronts{i} = Q;
end
fronts(cellfun('isempty', fronts)) = [];
end
function flag = dominates(obj1, obj2)
flag = (obj1(1) <= obj2(1) && obj1(2) <= obj2(2)) && (obj1(1) < obj2(1) || obj1(2) < obj2(2));
end这里fastNonDominatedSort函数实现了非支配排序。它首先初始化一些数组,然后通过双重循环比较种群中每个个体的目标函数值,确定支配关系,将非支配个体放入第一个前沿(fronts{1})。接着通过循环不断找出下一层的非支配个体。dominates函数则用于判断一个个体是否支配另一个个体。
以上代码只是整个求解过程的部分核心代码片段,实际完整实现还需要小龙虾优化算法的移动、更新等操作代码。但通过这些代码,大家应该能对基于非支配排序的多目标小龙虾优化算法求解 FJSP 有个更直观的认识。在实际应用中,可根据具体问题对参数和代码细节进行调整优化,以获得更好的调度方案。希望这篇博文能给在这个领域探索的小伙伴们一些启发!

小龙虾开发者社区是 CSDN 旗下专注 OpenClaw 生态的官方阵地,聚焦技能开发、插件实践与部署教程,为开发者提供可直接落地的方案、工具与交流平台,助力高效构建与落地 AI 应用
更多推荐


 5
5 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)