- @huangzhe0701
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
获取 API 密钥。阅读 API 文档。构建并发送 HTTP 请求。处理响应并提取数据。注意错误处理和使用限制。如果你有具体的 DeepSeek 接口文档或需求,可以提供更多细节,我可以帮助你进一步优化代码!

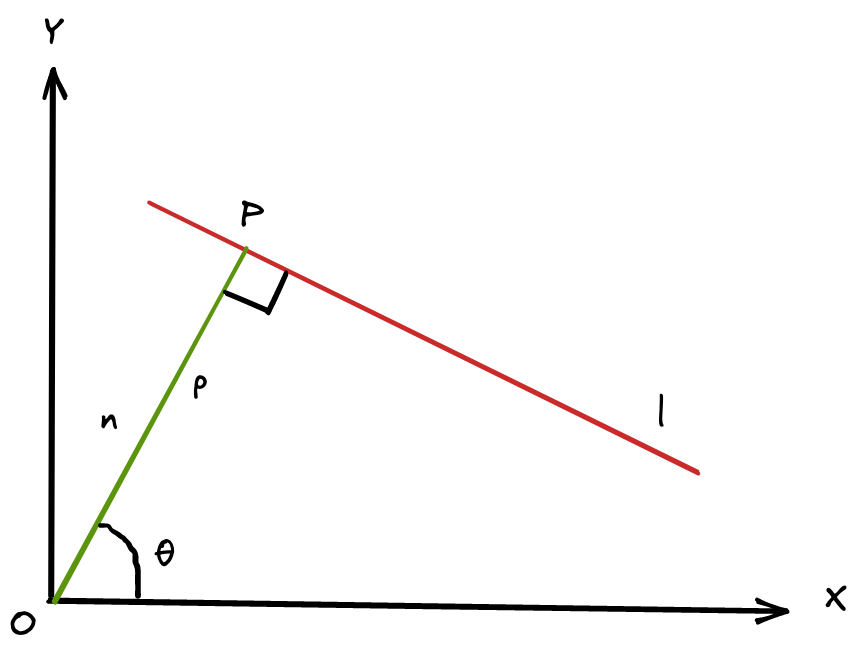
直线和坐标系可以画图为如图所示的形式:直线lll法线过原点,法线与直线相交于定点PPP,法线长度为ρρρ,法线方向矢量为nnn,法线和横轴夹角为θθθ。根据参考资料,直线的“点法式”表达式为:A(X−X0)+B(Y−Y0)=0A(X-X_0)+B(Y-Y_0)=0A(X−X0)+B(Y−Y0)=0套用本图中,定点坐标为:X0=ρ⋅cos(θ),Y0=ρ⋅sin(θ)X_0 = ρ·\rm{co
输入命令:前提是安装了CUDA,显示结果为:
Ubuntu 默认使用 Snap 安装某些应用(如 Firefox、Chromium),这些应用会自动更新。你可以禁用 Snap 的自动更新。在Ubuntu中,如果你希望停止程序或系统的自动更新,可以通过以下几种方式来实现。是 Ubuntu 中用于自动更新软件包的服务。要停止自动更新,可以禁用该服务。如果你只想临时停止自动更新,可以通过修改 APT 配置文件来实现。通过这些方法,你可以灵活控制 U

在Ubuntu中,你可以通过命令行将系统从Ubuntu 20.04 LTS(Focal Fossa)升级到Ubuntu 22.04 LTS(Jammy Jellyfish)。
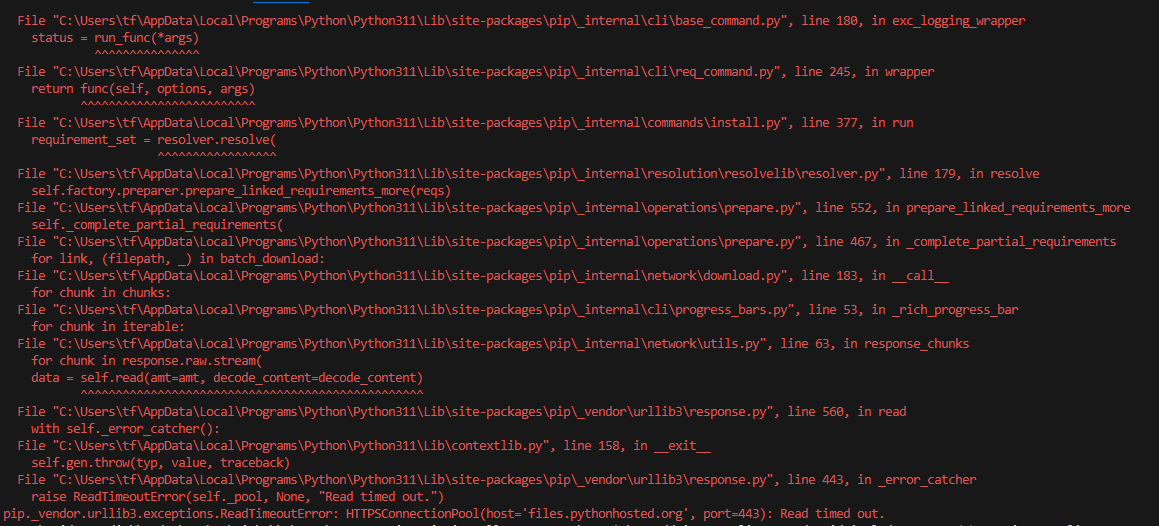
【代码】opencv-python安装失败问题解决。
假如我想检测一张电路板某个焊片的尺寸,整个电路板的尺寸是50mm×50mm,相机需要拍到整个电路板全貌,单个焊盘的尺寸是5mm×5mm,如下图所示:先确定整张图片的分辨率,通过这个指标确定相机,就是想用多少像素拍整张图片。假如我们想用1024×1280像素的分辨率显示整张图像,那么图像的总像素数为1310720pixels,大约130万像素,如果选用aca1300-60gm-NIR型号相机,按照相

直线可以表达成y=kx+by=kx+by=kx+b的形式,这是用斜率和截距表达出来的。也可以用“点法式”来表示,
霍夫变换检测直线的原理是利用累加器找到最大的(ρ,θ)(ρ,θ)(ρ,θ)数对,如文章所述。圆形的数学表达式为(x−xcenter)2+(y−ycenter)2=r2(x-x_{center})^2+(y-y_{center})^2=r^2(x−xcenter)2+(y−ycenter)2=r2,其中(xcenter,ycenter)(x_{center},y_{center})(xcente