- @han1202012
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
一、DOM 方式获取标签元素1、DOM 方式获取标签元素2、DOM 方式获取标签元素的弊端3、DOM 方式获取标签元素示例二、节点简介1、DOM 节点概述2、节点基本属性 - 节点类型、节点名称、节点值3、代码示例
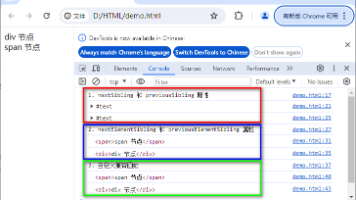
一、JavaScript 兄弟节点操作1、获取兄弟节点属性 - previousSibling、nextSibling、previousElementSibling、nextElementSibling 属性2、获取兄弟节点属性 - 自定义兼容函数二、兄弟节点操作 - 代码示例1、完整代码示例2、执行结果
一、JavaScript 创建节点案例1、需求说明2、CSS 样式说明清除元素内外边距文本域样式按钮样式列表样式3、JavaScript 脚本 - 创建并添加元素获取 DOM 元素为 按钮 设置点击事件创建元素添加元素二、完整代码示例1、代码示例2、执行结果

一、JavaScript 复制节点1、复制节点简介2、cloneNode 函数原型3、复制节点 - 案例代码示例执行结果
一、document.write() 方式动态创建元素1、document.write() 函数简介2、代码示例 - document.write() 创建元素二、element.innerHTML 方式动态创建元素1、element.innerHTML 方式简介2、代码示例 - element.innerHTML 方式动态创建元素三、document.createElement() 方式动态创建
一、事件注册方式1、事件注册简介2、传统方式 注册事件3、方法监听方式 注册事件 ( 推荐使用 )二、代码示例1、完整代码示例2、执行结果
一、事件注册方式1、删除传统方式注册事件2、删除方法监听方式注册事件二、完整代码示例1、代码示例2、执行结果

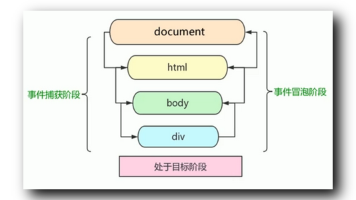
一、DOM 事件流1、DOM 事件流简介2、捕获阶段 Capture Phase3、目标阶段 Target Phase4、冒泡阶段 Bubbling Phase5、DOM 事件流案例说明二、代码示例1、捕获阶段 事件处理 代码示例① 代码示例② 执行结果2、冒泡阶段 事件处理 代码示例① 代码示例② 执行结果
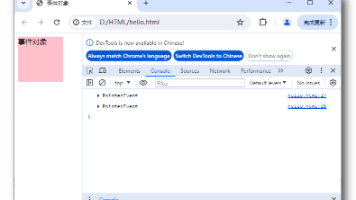
一、JavaScript 事件对象1、事件对象2、事件对象兼容性处理二、代码示例1、代码示例 - 事件对象① 代码示例② 执行结果
一、JavaScript 事件对象属性1、事件对象属性类型2、事件对象 通用属性3、事件对象 鼠标事件属性二、JavaScript 阻止事件行为1、阻止默认行为2、阻止事件传播三、JavaScript 事件委托1、事件委托2、事件委托步骤3、事件委托代码示例二、代码示例1、代码示例 - 事件类型属性① 代码示例② 执行结果2、代码示例 - 阻止默认行为① 代码示例② 执行结果3、代码示例 - 阻止