




- @checkpaper
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
*GCN(图卷积网络)**用于提取空间特征。GCN可以利用邻域气象站的空间信息,通过图结构捕捉不同气象站之间的关联性。**BiLSTM(双向长短期记忆网络)**用于处理时间序列特征。BiLSTM能够有效捕捉序列的双向依赖关系,对气象时间序列的历史信息进行有效建模。结合模型:GCN用于提取各个气象站的空间关系,BiLSTM用于处理时间序列特征,结合二者构建一个时空相关的天气预测模型。

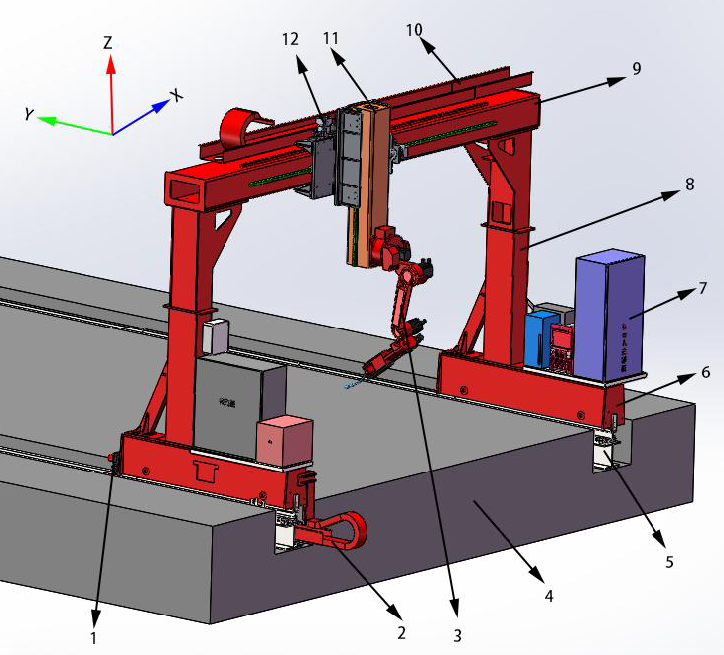
焊接是机械制造加工生产过程中的一个非常重要的工业技术之一,在大型机械制造加工工艺中是不可缺少的一部分,焊接机器人作为工业设计、工业制造中的“裁缝”,焊接的质量和焊接工艺水平在提升企业技术水平、产品质量、企业生产效率和提高企业竞争力等方面具有举足轻重的作用。焊接机器人一直是国内外研究的重点,广泛应用于制造业的各个领域,特别是针对大型零部件的龙门式焊接机器人,其在大型重型特种设备、大型钢构件及大型船舶
提出一种基于障碍物影响因子的启发函数改进策略,在代价函数g(n)中加入障碍物距离惩罚项:g_new(n) = g(n) + w_obs * exp(-d_obs / r),其中d_obs为节点n到最近障碍物的欧氏距离,r为影响半径(0.5米),w_obs为权重系数(取3.0)。同时,启发函数h(n)采用对角线距离并加入动态权重系数:h(n) = D * min(dx, dy) + (sqrt(2)
最后,针对优化设计后的实际双轮腿机器人模型,搭建 ADAMS 与 MATLAB 联合仿真平台,在 ADAMS 中建立机器人的机械动力学模型,在 MATLAB/Simulink 中搭建改进 GA - LQR 控制器模型,通过接口实现两者之间的数据实时交互,模拟机器人在不同工况下的运动过程,如平坦路面直线行驶、弯道转向、不同腿长下的高低位行驶等,实时采集机器人的姿态数据(倾角、偏航角)、轮体运动数据(
本研究的改进方案通过精心设计的密文运算协议实现了交叉熵损失的密文计算,减少了训练误差积累,提高了模型收敛精度。参与各方首先生成各自的公私钥对并将公钥提交给协调服务器,服务器根据收集的公钥计算联合公钥和重加密密钥,后续各方使用重加密密钥将本地密文转换为联合公钥下的密文即可参与协同计算。椭圆曲线密码具有密钥短、计算快的优势,特别适合资源受限的物联网设备。实际应用场景中,参与深度学习训练的各方往往使用各
为系统研究激光工艺参数对除漆质量的影响,采用Box-Behnken试验设计方法,以激光功率、扫描速度、脉冲频率和重复扫描次数为关键工艺参数,设计多因素多水平试验方案。模型分析表明,激光功率和扫描次数对除漆厚度的影响最为显著,而扫描速度与功率的交互作用对表面粗糙度具有重要影响。响应面法优化得到的最佳工艺参数组合经过验证试验,结果显示实际除漆厚度与预测值误差小于5%,表面粗糙度也符合预期要求,表明响应
深度学习是基于人工神经网络的多层结构,通过自动学习数据的特征表示,广泛应用于图像识别、自然语言处理等领域。卷积神经网络(CNN)是目标检测领域中最常用的深度学习模型,利用卷积操作提取图像中的特征,同时通过池化层进行下采样,有效减少计算量。

图像在人类生产生活中具有极大价值,而图像分辨率决定了其中存储的信息量。近年来,基于深度学习的方法成为主流,但多数方法设计复杂网络结构以追求更好重建效果,这导致网络模型参数量和计算量较大,难以应用于计算资源有限的设备。同时,一些使用像素级损失训练的网络模型,重建图像往往过于平滑,缺乏纹理特征。实验表明,LMDFFN 网络在具有较低模型参数量和计算量的情况下,在定量评价和视觉质量提升上都取得了优异的效
有的题目可以直接用,有的还需要再细化下,稍微改动一下,也能作为创新的选题。总的来说,最重要的就是定的题目要确保后续能够写的出来,写的顺畅。本人长期从事这方面的科研工作,去年光是帮忙修改和润色就有几十篇文章,这里分享一些今年最新的题目及写作指导。基于双目视觉的螺旋式粮面机器人平粮作业测距与目标识别定位研究。具有视觉拾取功能的Delta机器人的研究与设计。基于双目视觉的工业机器人目标识别与定位系统研究

✅博主简介:本人擅长数据处理、建模仿真、程序设计、论文写作与指导,项目与课题经验交流。项目合作可私信或扫描文章底部二维码。在物联网流量分析中,本文关注两个典型场景:智能家居和智能工业。在对这两个场景中的流量数据进行统计分析时,首先,我们从量级分布层面入手,对各个流量标签的数量进行了统计。分析结果显示,公开网络数据集中普遍存在数据不均衡的问题,少数类样本的数量远低于多数类样本,导致分类器在训练时可能
