




- @aerror
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
使用clang++编译出来的android程序,实际真机运行出现 cannot locate symbol "_ZTTNSt6__ndk114basic_ofstreamIcNS_11char_traitsIcEEEE" referenced by。重新上传,运行ok.

签名绕过的第二个办法是不要改dex, 改一下androidmanifest.xml, 把 com.pairip.application.Application改成android.app.Application. 原理很是com.pairip.application.Application继承android.app.Application, 只是多了一些签名验证,刚好我们不需要,使用基类跑就好了。然
、、1. 手上512GMBP 2013 late差不多满了,因为穷,所以在淘宝上买了一个NVME转Macbookpcie,然后再买一个NVME 2T的硬盘2. NVME因为需要最新的Firmware Rom支持,所以必须使用原装的硬盘(必须原装)安装Mac14以上,我安装了14.5.要不然识别不出来新安装的NVME硬盘3. 买之前就知道是会有休眠问题的,问了卖家推荐了一些型号说不...
还是那一句,实在用不了keil , 但是很多例子和代码都是使用keil写的,手动转过一些,现在个转换写个一个程序。方便自己,方便大家。
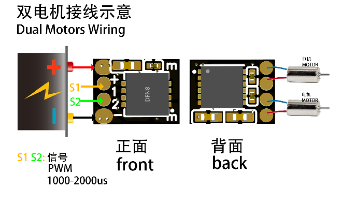
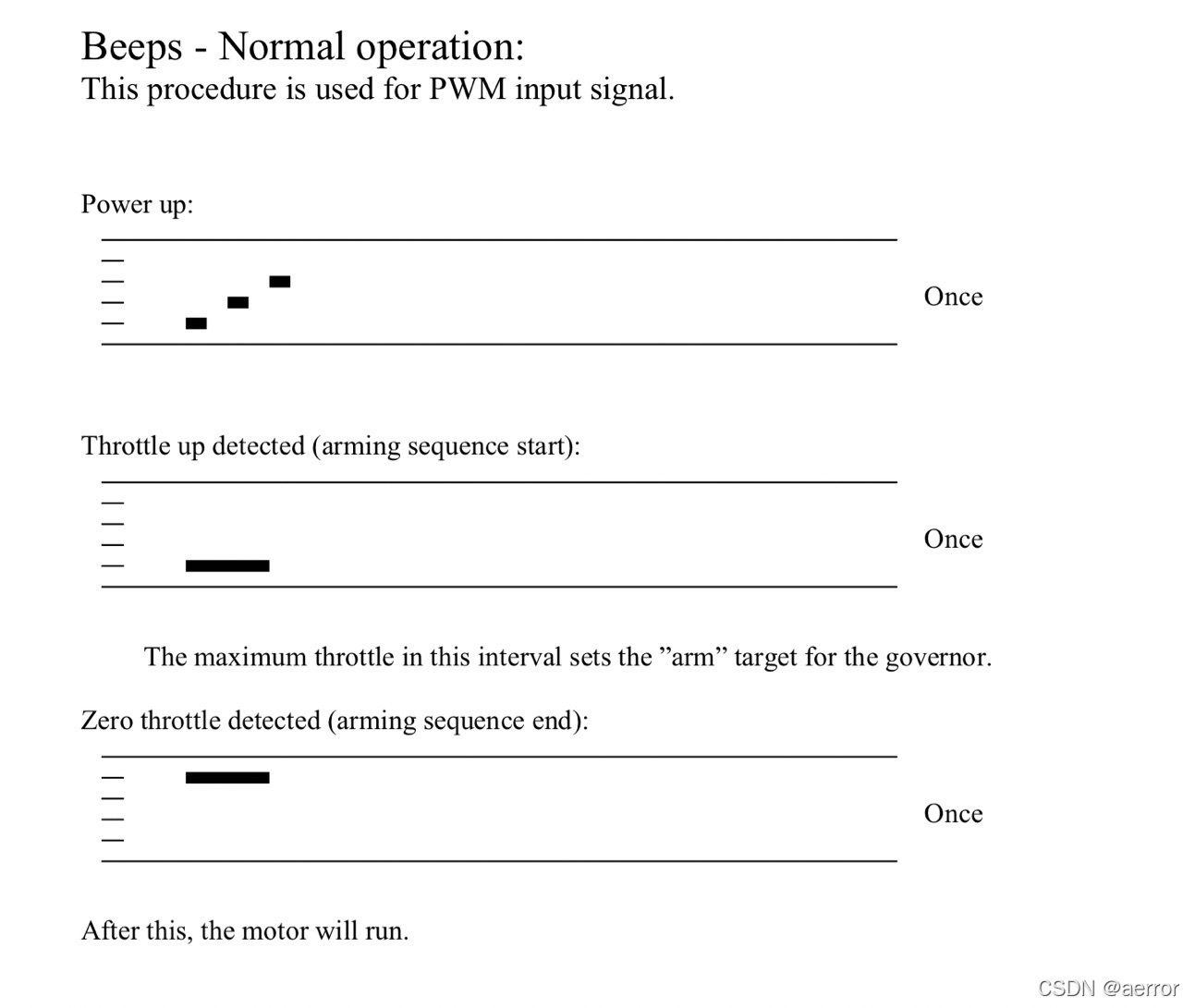
本电调支持通过串口进行编程控制,实现单向通信控制。设置的电调需要接上喇叭或者电机,电调使用喇叭和电机发出声音来回应串口指令的设置。启动后,可以响应PWM设置指令,根据设置去驱动电机或者喇叭。
介绍了RX42BL接收器集成标准BLHELI电调,使用遥控器进行参数修改的方法, 提供11个可调参数(如0-30度换向时序)
本文介绍了基于STC15单片机的双路电机控制代码移植和优化过程。原始代码是为Keil51设计的,作者将其修改为可兼容SDCC编译器的版本,适用于macOS系统。主要修改包括:寄存器声明方式调整、IO引脚定义重映射、位操作优化为位域处理,并添加了Makefile和调试工具。代码实现了两路PWM电机控制,包含信号检测、混控算法、摩擦力补偿和死区处理等功能,通过10μs定时器中断实现100级分辨率的软件
本来一向使用SDCC,后来发现同一套代码工程Keil编译出来的代码小20%左右。但是Keil的IDE和编辑器相当难用,看着极不顺眼。后来发现VScode可以调用Keil来编译。我研究一下了,发现也是可行的。3. 需要安装cywin,然后在sublime上使用我上编文章的cywinmake的buildsystem。4. ctrl+b就可以使用keil来编译了。

以为是vmware的,使用上面的命令把vmnet都停了,发现还在。ifconfig 看了一下,发信息多了一个bridge..到 系统偏好设置->共享->互联网共享 这个关掉。各项服务启动也是正常的,但是就是vm没有网络了。想了半天,原来是在wifi上打开了共享互联网。记录一下,备忘和帮忙遇到同样问题的人。一直好端端的,突然打开vm提示这个。启动vmware的那堆服务器。再打开vm, 发现不提示。查

Pgm_Beacon_Delay会和Power_On_Wait_Cnt_H相减,要是借位,就会开始beep f4, beep一次Power_On_Wait_Cnt_H会减1,就是Power_On_Wait_Cnt_L是255的时候beep一次了。如果有信号(Rcp_Timeout_Cntd不是零),同时New_Rcp(油门)不是零跳到 wait_for_power_on_nonzero, 再检查一