
写文章




- @ZDPZN
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
AirSim相机、IMU内外参分析(VIO、vSLAM)
假设你想通过AirSim获取仿真数据运行VIO或者生成点云等等,现在你可以获得图像、IMU以及真值,但是你又不知道这些传感器之间的外参如何定义?相机的内参又是多少?AirSim的接口坐标系定义又是如何?那么这篇文章将会尝试对AirSim做一个剖析。

AirSim中运行VIO算法(VINS-Mono)
VINS-Mono在AirSim上跑通,主要介绍了IMU参数配置、相机参数设置以及关于AirSim发布数据问题的可能的方法
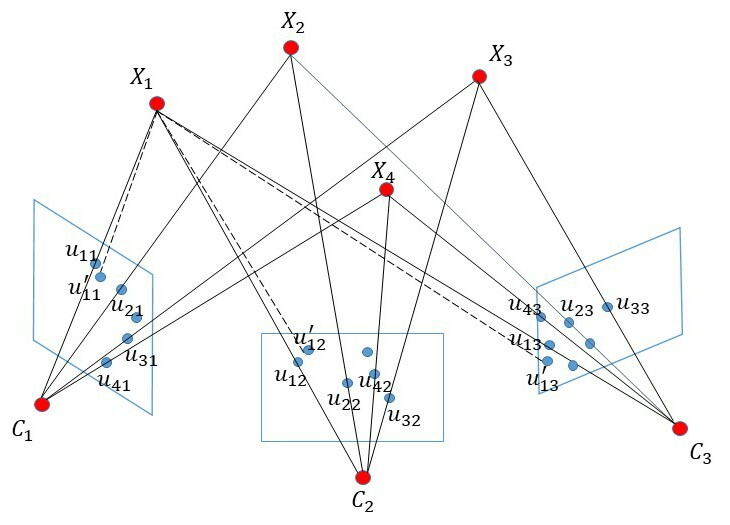
BAL数据集格式解读
BAL数据集格式解读在学习BA时用到BAL数据集, 这里记录一下我学习笔记。BAL数据集的地址:Bundle Adjustment in the Large官网上关于数据集给出的解释如下:<num_cameras> <num_points> <num_observations><camera_index_1> <point_index_1>
kubeadm init 运行时kebelet启动失败问题
解决k8s kubeadm init时遇到的kubelet问题
到底了