




- @ZARDforever123
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
简单介绍了Yolov8的环境环境配置以及训练自己数据集的方法一、环境配置与功能测试1.1 安装 目标检测 实例分割 分类 姿态检测 训练数据标注 数据集训练方法 命令训练 代码训练

相机和IMU的内参标定,相机、IMU和LiDAR之间的联合标定方法,其中工具包的安装环境均在Ubuntu20.04环境下,使用的工具包括:MATLAB工具箱、ROS标定工具包、kalibr、OpenCV、imu_utils、calibration_camera_lidar、lidar_imu_calib

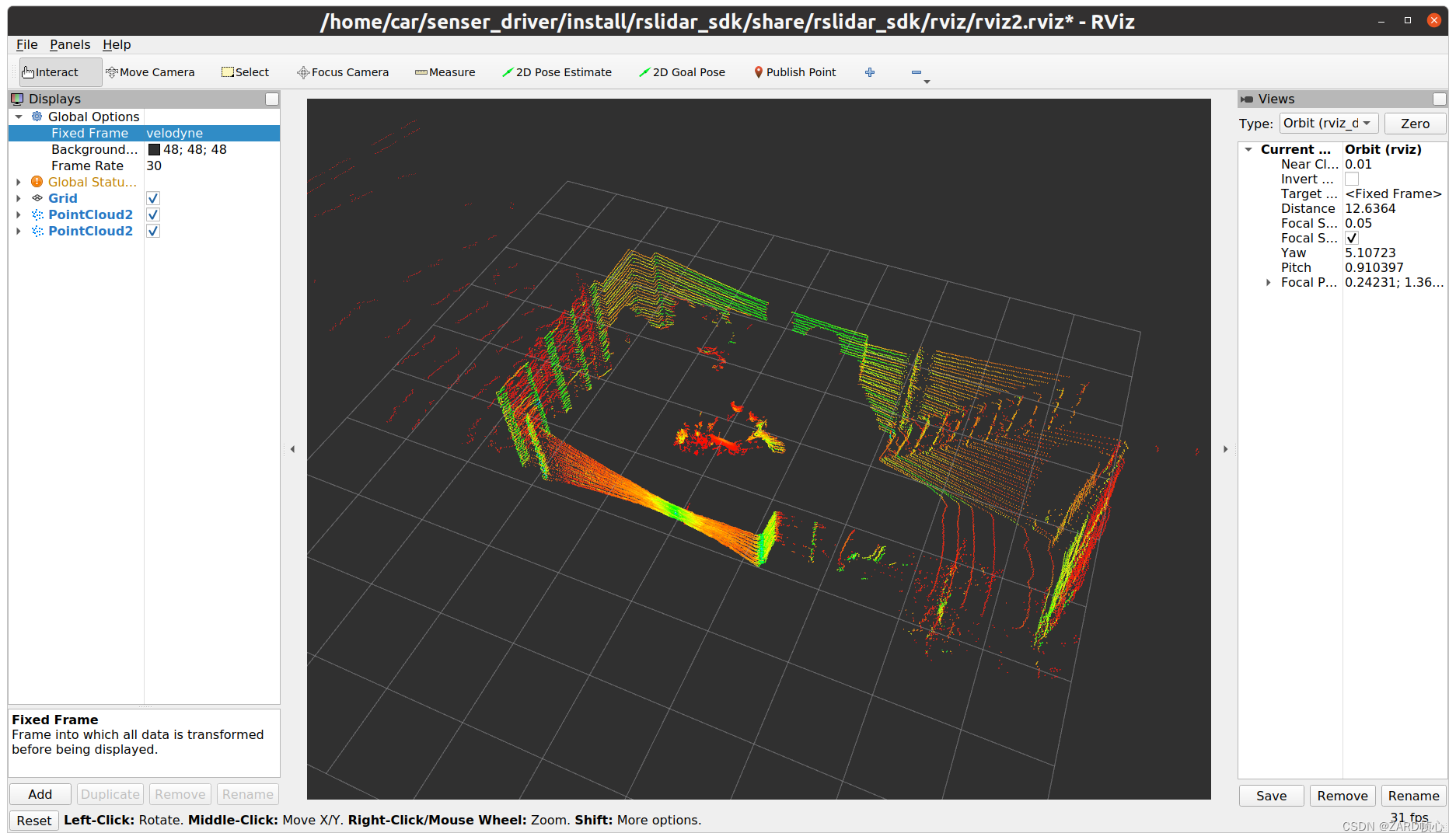
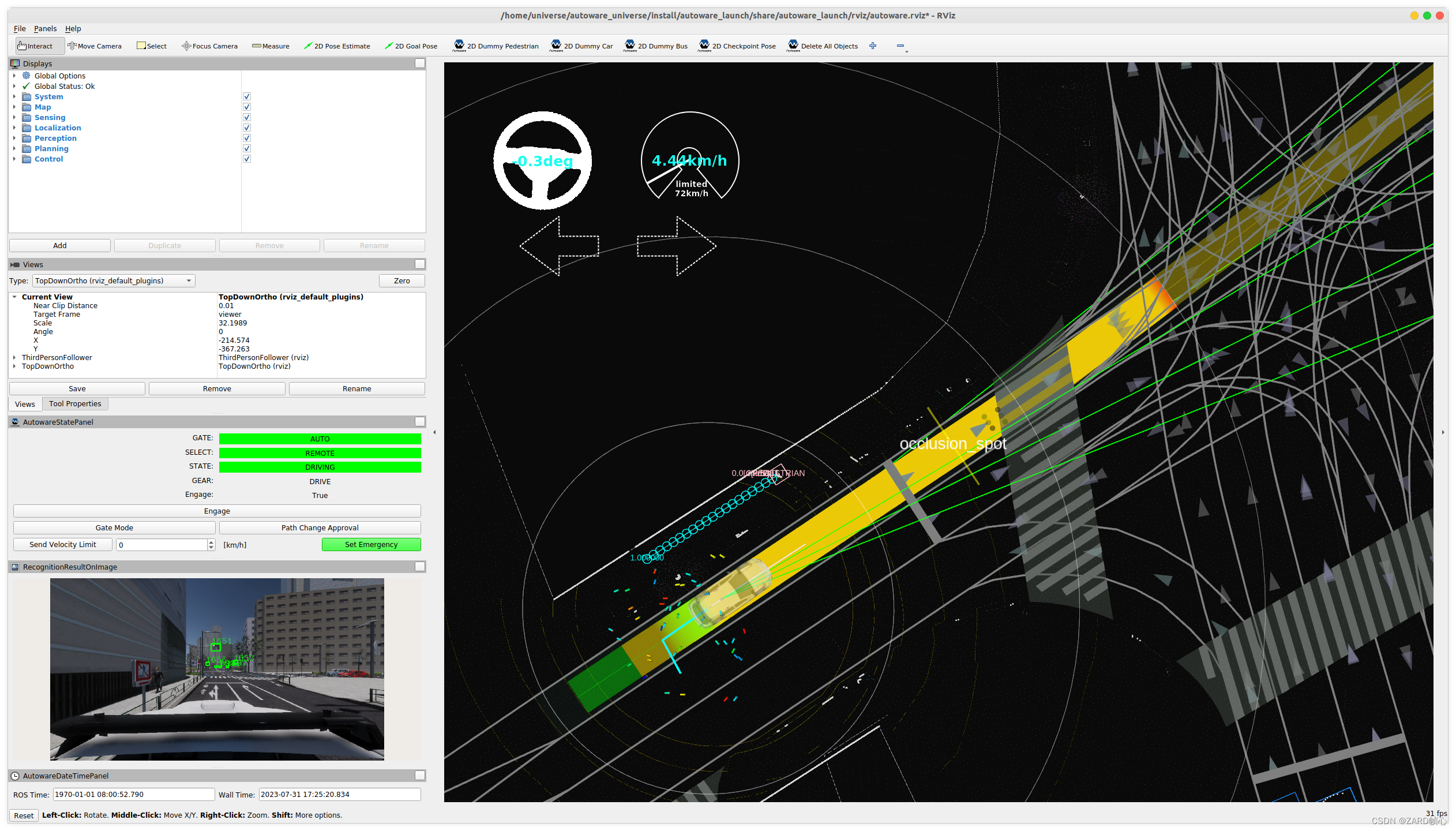
本文介绍了 Autoware.universe 各个传感器ROS2驱动,本系列其他文章:Autoware.universe部署01:Ubuntu20.04安装Autoware.universe并与Awsim联调Autoware.universe部署02:高精Lanelet2地图的绘制Autoware.universe部署03:与Carla(二进制版)联调
去[官网](https://download.qt.io/archive/)下载,选择qt/下的安装包,会直接安装qtcreator:的.run文件下载。打开终端,运行qtcreator。安装 openGL 库。第一项为GUI,第二项为控制台编程,以选择GUI为例,填写项目名称,选择路径,并确定是否设置为默认路径

每版的Ubuntu系统版本都有与之对应ROS版本的,每一版ROS都有其对应版本的Ubuntu版本,不可随便装,ubuntu20.04对应ROS1 noetic和ROS2 foxy版本。

在Ubuntu 20.04上安装Autoware.universe并实现与Awsim的联调。Autoware.universe是一套开源的自动驾驶软件工具,提供强大功能和库,帮助用户构建和测试自动驾驶系统。与此同时,Awsim是一个模拟器,能够模拟真实驾驶场景,为开发者提供安全可靠的测试环境。您将学习如何轻松安装Autoware.universe,并了解如何与Awsim配合使用,验证和优化自动驾驶
在新安装的Ubuntu 20.04系统中配置ORB-SLAM2和ORB-SLAM3的运行环境Ubuntu系统自带的源都是国外的网址,国内用户在使用的时候下载比较慢甚至无法获取,在安装各种库或软件时会深受其折磨!解决方案是直接替换成国内的镜像源(1)备份源文件:(2)打开文件:(3)换源:推荐清华的源(根据自己的网去尝试,选择最快的一个,查看ubuntu版本命令:cat /etc/issue):清华

DynaSLAM结合Mask_RCNN和多视图几何,在ORB-SLAM2的基础上去除动态特征,因此在[Ubuntu 20.04配置ORB-SLAM2和ORB-SLAM3运行环境+ROS实时运行ORB-SLAM2+Gazebo仿真运行ORB-SLAM2+各种相关库的安装](https://blog.csdn.net/zardforever123/article/details/125044004?s
这里安装是Ubuntu20.04.5 LTS、Ubuntu18.04.6 LTS与Windows11的双系统,本人笔记本:暗影精灵8,独显:RTX3060,硬盘:512GB,BIOS模式UEFI模式(现在的电脑一般都是,若不是本文不可用:此电脑 -> 管理 -> 设备管理器 -> 系统管理 可以查看),参考:[Windows 和 Ubuntu 双系统的安装和卸载](https://www.bili
本文介绍了 Autoware.universe 各个传感器ROS2驱动,本系列其他文章:Autoware.universe部署01:Ubuntu20.04安装Autoware.universe并与Awsim联调Autoware.universe部署02:高精Lanelet2地图的绘制Autoware.universe部署03:与Carla(二进制版)联调