




- @YiYeZhiNian
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
通常而言确定空间中的一个点的坐标需要三个点,也就是俗称的三点定位。但是在某些时候,场景内可能不一定能够采样到足够多的反光柱,比如只有两个。这个时候看起来似乎参数是不足的,毕竟机器人的参数有三个,两个方程是不够的,但是这个方程其实也不是没有解的方式,具体的解答方式继续往下看
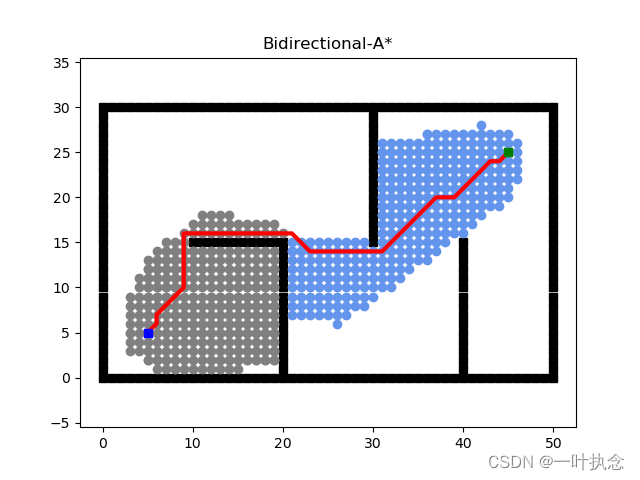
前面看最佳路径优先搜索算法的时候顺便研究了一下它的改进算法:双向最佳路径优先搜索算法。那既然有双向最佳路径优先搜索算法自然也可以有双向A* 算法。这篇文章简单看一下双向A*算法的基本原理以及代码实现。
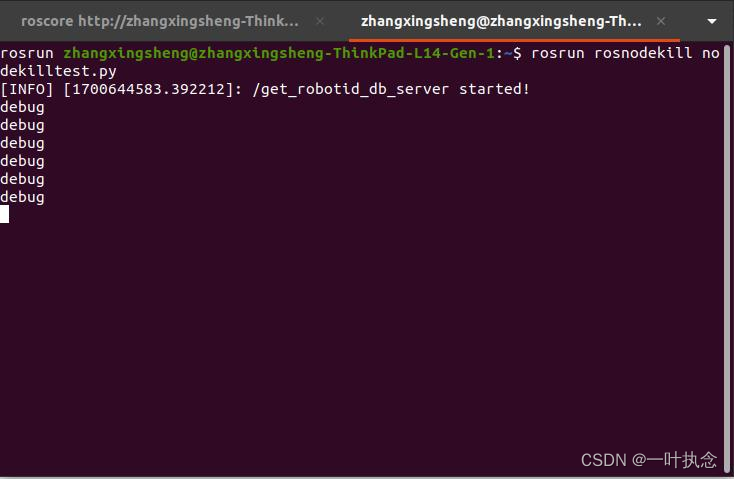
在ROS开发中,节点的管理是很重要的一部分,其中有一些节点大部分时候用不到,只会在特定情况下被启动(比如建图节点)同时这些节点在使用完后还需要被关闭,因此我们就需要在程序中对这些节点进行启动与关闭的管理。在python中,针对这个问题ROS中可以使用roslaunch功能包解决这个问题。通过简单的几行代码就可以实现具体功能:
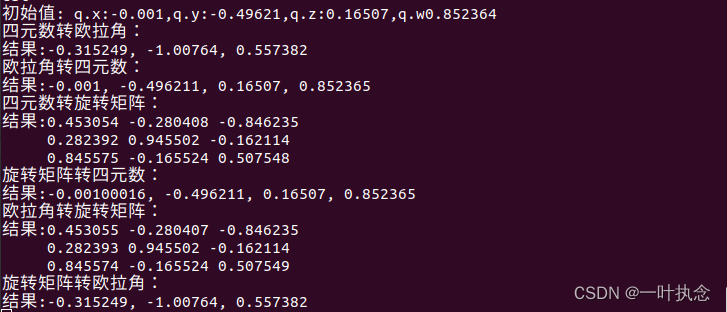
在平时使用ROS时,经常需要用到各种位姿。例如机器人的pose、里程计的数据、机械臂的末端位姿等。大部分时候主要以使用四元数为主,但是四元数本身不是很直观,比如在需要对角度进行加减运算的时候就不太方便直接操作四元数而是会转换成欧拉角的形式,而当我们进行位姿间转换的时候,一般需要进行旋转矩阵进行乘法运算,这时候需要将四元数转换成旋转矩阵。在ROS中,可以使用tf库对这三者进行简单的转换。
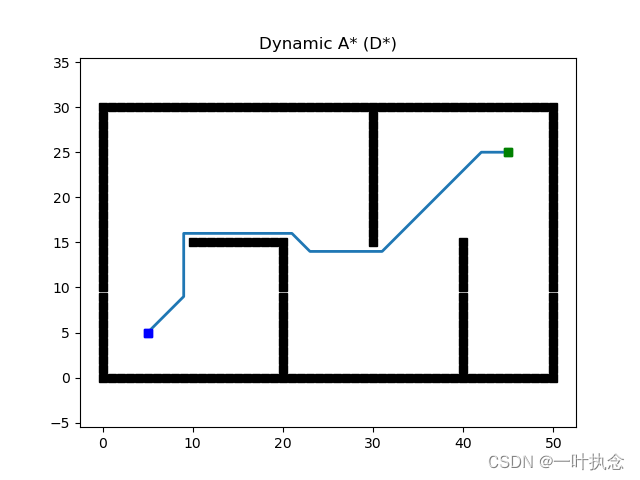
前面学习了Dijkstra以及A* 算法的基本原理,对于这两种算法而言,我们都能在有解的情况下找到一条沿着起点到达终点的路径。然而,这两个算法本身都是基于静态地图的,也就是说:当机器人找到路径后开始沿着起点向终点运动的过程中,默认地图是不会发生变化的,但是实际上大部分时候我们知道地图是动态的,随时存在一个突然出现的障碍物挡在原有的路径上,那么这时候原有的路径就失效了。
之前调试了ORB_SLAM2的gazebo仿真,现在需要在ROS中使用到ORB_SLAM2的位姿,但是ORB_SLAM2本身是没有位姿的ROS话题输出的,参考了github上相关问题的探讨:Get Pose Information from ORBSLAM最后成功得到了ORB_SLAM2运行时机器人的位姿反馈。分析源代码最终会发现对于ORB_SLAM2而言,位姿由以下处理函数返回:mpSLAM-&
对于四舵轮车辆,或者对角线安装的双舵轮车辆来说,当同时存在线速度与角速度的时候,它的两个轮子的角度值是不一样的,而它的角度值与其当时的瞬心相关(关于这块的计算最近也花时间理解了一下,做个笔记。

题目:给你一个非负整数 x ,计算并返回 x 的 算术平方根 。由于返回类型是整数,结果只保留 整数部分 ,小数部分将被 舍去 。注意:不允许使用任何内置指数函数和算符,例如 pow(x, 0.5) 或者 x ** 0.5 。解题方法一:class Solution {public:int mySqrt(int x) {if(x==0)return 0;if(x==1)return 1;
最近在看cartographer算法,其中的闭环优化使用到了branch and bound(分支定界)算法,这里简单记录一下:简单的说,分支定界算法的主要思想是用数的节点表示所有可能的子集,根节点表示所有可能的解,叶节点表示所有的解。...
之前试过用jetpack3.2.1安装,但是期间各种坑,最后卡在jetpack is unable to determine the IP address of the jetson developer kit.....这里了,试过一些网上的方法最后也没有成功,现在改成了用4.2版本的。上位机用的是win10系统下的虚拟机,安装的是Ubuntu16.04jetpack4.2版本的界面与之前三点几.