- @Tulingjin
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
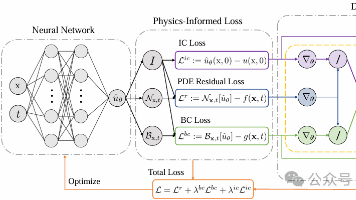
【150字摘要】深度学习与物理建模的融合正革新科学计算,神经PDE方法突破传统网格限制,实现速度与精度双赢。近期研究聚焦三大方向:1)PIED框架首创PINNs实验设计,通过元学习共享参数和可微优化标准提升逆问题求解效率;2)双平衡机制动态调整PINNs损失权重,解决梯度分布与拟合难度不平衡问题;3)PINO首次成功求解高阶耦合相场方程,傅里叶域计算使四阶导数精度提升12个量级。这些方法在顶刊顶会
这些研究不仅在理论层面取得了突破,更在实际应用中展现了巨大潜力,为自动驾驶、智能交通等领域的未来发展提供了新的思路和方法。
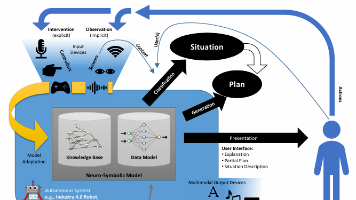
在当今人工智能的研究浪潮中,多模态融合与可解释性已经成为高端局的必备技能!小图特为您带来最新的相关论文,看看它们是如何在可解释的多模态融合领域中找到创新点并解决实际问题的!
这些研究不仅在理论层面取得了突破,更在实际应用中展现了巨大潜力,为自动驾驶、智能交通等领域的未来发展提供了新的思路和方法。
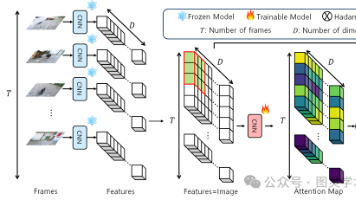
【计算机视觉前沿技术进展】本文介绍了三项突破性研究:1)BoQ提出基于可学习查询的图像检索方法,通过交叉注意力实现高效特征聚合;2)CSTA创新性地应用2DCNN处理视频帧序列,实现低计算成本的时空注意力;3)SG-LLIE结合CNN与Transformer,利用结构先验提升低光照增强效果。这些工作分别在图像检索、视频摘要和低光照增强领域取得state-of-the-art性能,显著提升了算法的效
当 LiDAR 遇上 4D 雷达,当扩散模型牵手视觉语言大模型,特征融合+目标检测正上演“速度与激情”!
这些研究不仅在理论层面取得了突破,更在实际应用中展现了巨大潜力,为自动驾驶、智能交通等领域的未来发展提供了新的思路和方法。
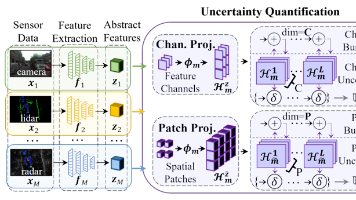
【前沿速递】CVPR 2024三项突破性研究揭示多模态视觉融合新范式:HyperDUM通过超维计算与原型学习,在自动驾驶感知中实现高效不确定性量化;DSPNet创新性整合点云与多视图特征,通过文本引导提升3D场景理解;GIFNet首创低层次任务交互机制,以单一模型驾驭红外融合、多焦合成等跨域任务。这些研究突破模态边界,实现底层特征深度融合,在3D目标检测、语义分割等任务中显著提升性能,同时降低计算
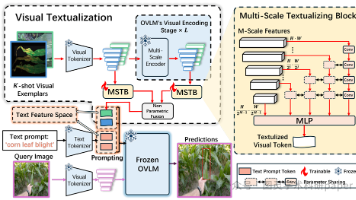
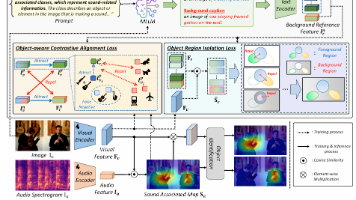
【CVPR多模态研究突破:高效视觉理解新范式】三篇最新研究揭示了AI理解高分辨率图像的关键突破:1)ECP框架通过两阶段处理(先粗定位后细预测),在4K/8K任务上提升5-21%性能;2)音频-视觉定位创新性地利用MLLMs区分发声/静默对象,结合OCA/ORI损失实现多源分离;3)轻量级HIRE方法通过特征增强减少35%计算量,保持视觉问答性能。共同核心在于模仿人类分层处理信息,用算法设计替代暴
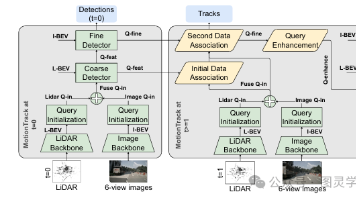
【CVPR三篇突破性论文解决目标追踪难题】UMotion、MotionTrack和OC-SORT三篇CVPR论文针对复杂场景中的目标追踪提出了创新方案。UMotion融合惯性单元与超宽带传感,通过不确定性驱动框架解决遮挡问题;MotionTrack采用Transformer架构实现激光雷达与视觉的多模态融合;OC-SORT则通过观察中心机制改进卡尔曼滤波,应对非线性运动。这些方法在自动驾驶、人机交