- @LAMIMvNaHSZu
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
这个地址后面配置MAC的时候要特别注意,很多兄弟在这里栽跟头。项目开发用到了Dp83848这一个以太网芯片,本人发现其配置起来比较麻烦,所以整理了一份STM32F107单片机驱动Dp83848的程序代码例程,方便大家学习相关代码的配置。项目开发用到了Dp83848这一个以太网芯片,本人发现其配置起来比较麻烦,所以整理了一份STM32F107单片机驱动Dp83848的程序代码例程,方便大家学习相关代
最近搞了个基于 STM32 芯片仿真的倒车测距提示系统,感觉还挺有意思的,今天就来跟大家分享一下。这个系统能实现倒车时测量车辆与障碍物的距离,并且根据不同距离给出相应提示,下面就详细说说整个系统的搭建过程。整个系统是以 STM32 为最小系统电路进行连接的。主要用到了按钮来控制系统开关,SRF04 超声波传感器采集倒车时与障碍物的距离,LM016L 液晶显示屏实时显示汽车与障碍物的距离。另外,还搭
这种“自然启发+机器学习”的组合,本质是让算法代替我们去做枯燥的调参试错。虽然蜣螂的“智慧”看起来有点无厘头,但实测下来,它确实能让随机森林少走很多弯路——至少比我们盯着屏幕狂调参数要高效多了!
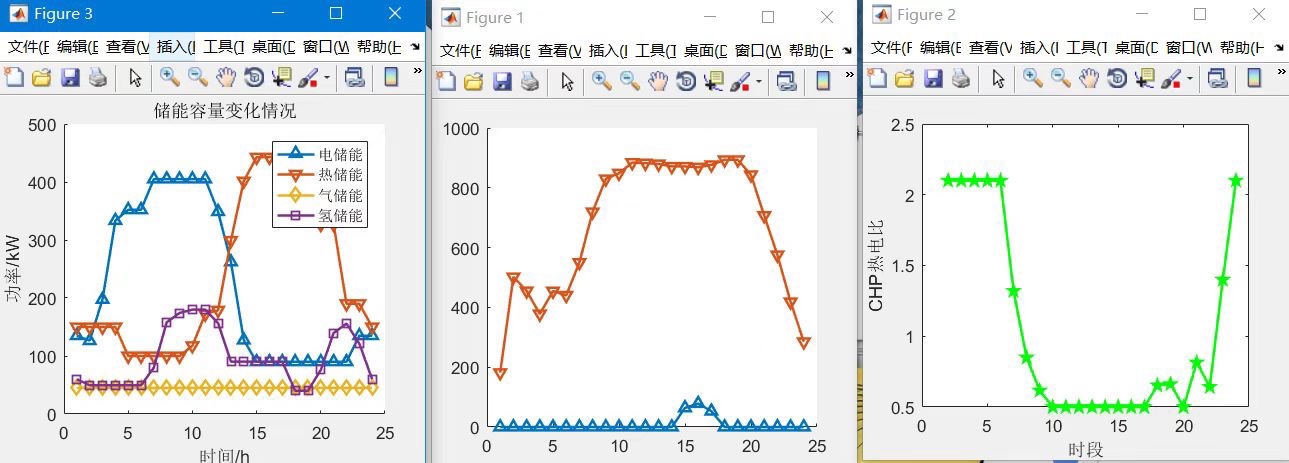
实现电、热、气、氢四能流的统一建模与协同优化;引入阶梯碳交易机制,真实反映碳成本对调度决策的影响;精准刻画多元储能的运行特性,释放其在多时间尺度下的调节潜力;以工程可行为前提,兼顾经济性与可持续性。该框架可作为园区级、区域级 IES 规划与运行的参考范式,亦可进一步扩展至考虑不确定性(如风电预测误差)、多时间尺度协调(日前-日内)、或与上级电网/气网互动等更复杂场景。
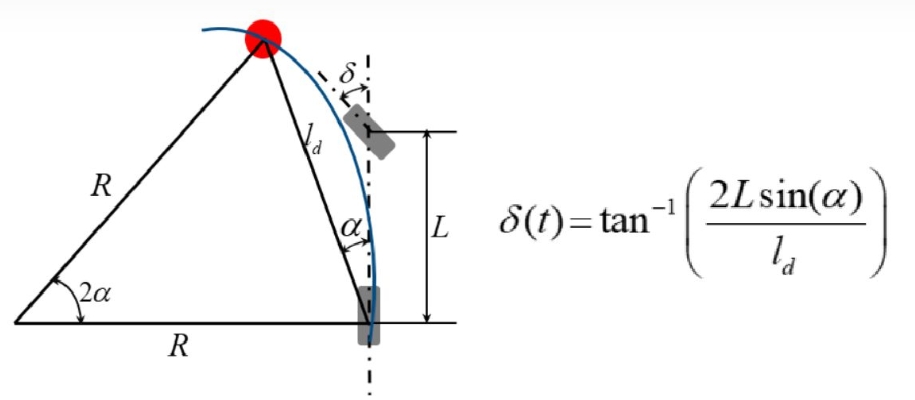
(工程项目线上支持)预瞄跟踪控制算法,单点或多点驾驶员模型,横制,纯跟踪算法。carsim和MATLAB Simulink联合仿真。附建模说明书在工程项目的线上支持领域,汽车控制算法的优化与验证至关重要。今天咱就唠唠预瞄跟踪控制算法、单点或多点驾驶员模型、横制以及纯跟踪算法,顺便讲讲基于 Carsim 和 MATLAB Simulink 的联合仿真,再附上建模说明书,让大家有个全面的了解。
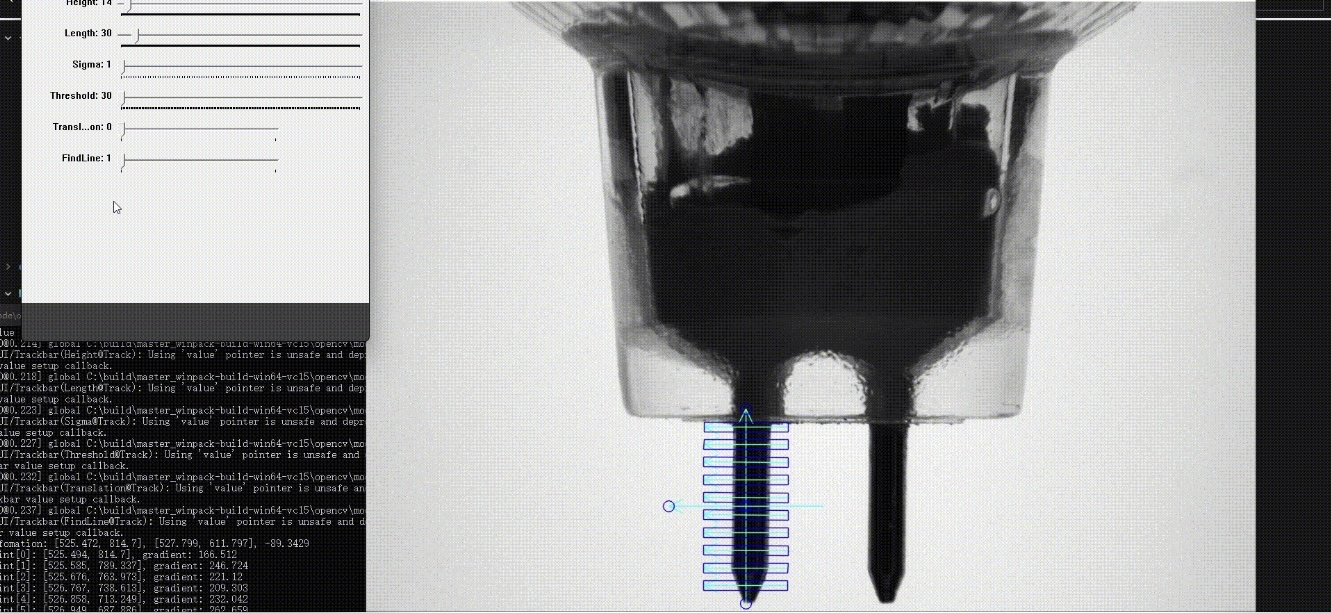
今天咱们用C++和OpenCV撸一个能实时拖拽测量的找边工具,核心代码不到200行,先看效果:按住鼠标拖出线段,程序自动捕捉两侧边缘并计算间距。需要源码的老铁评论区留言,注意代码依赖OpenCV4.x和ImGui(用于简单界面),欢迎二次开发!我们用ROI(感兴趣区域)实现这个"游标",垂直于测量方向生成多个采样线,通过边缘梯度检测抓取边界点。基于c++的opencv卡尺卡尺找边工具,可利用卡尺进
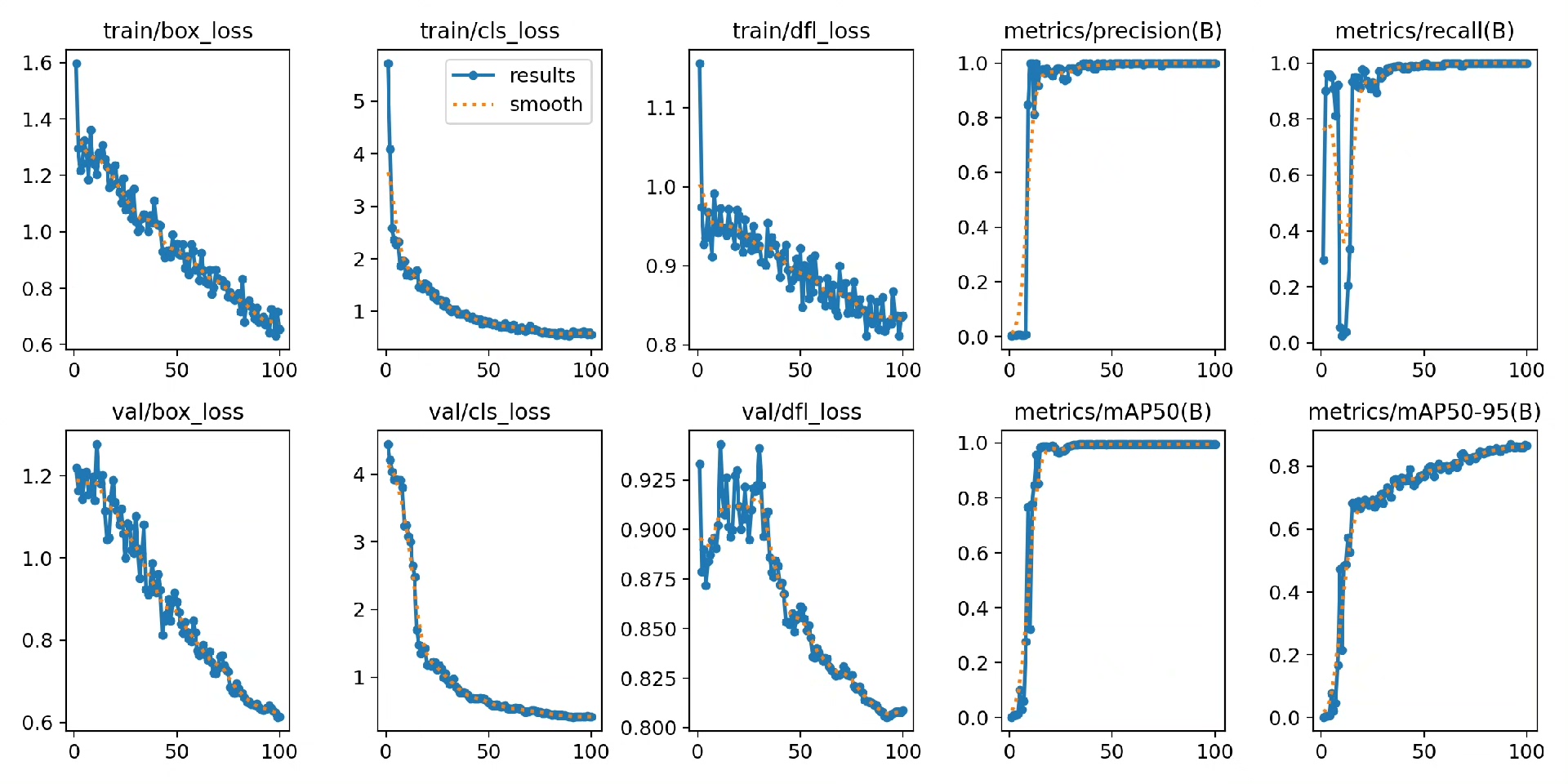
实际部署时模型推理速度到23FPS(在RTX3060上),但有个骚操作:把输入分辨率从640降到480,精度只降1.5%但速度提到35FPS。这里有个坑——OpenCV的BGR格式和PyQt的RGB格式会打架,得在显示前做颜色空间转换。F1曲线要是出现"双峰"形态,说明模型在召回和精确间反复横跳,这时候得检查数据标注质量。2.含模型训练权重和指标可视化展示,f1曲线,准确率,召回率,损失曲线,混淆
重点观察有效折射率差随波长的变化曲线,当TE和TM模的等效折射率差超过1e-4时,分束长度才能做到毫米量级。光子晶体光纤这玩意儿在光学圈子里算是常青树了,今天咱们就拿COMSOL这把瑞士军刀来扒拉几个有意思的仿真套路。先说模式分析这个基本功,COMSOL的波动光学模块里有现成的模式分析功能,但老司机都知道直接套用预设容易翻车。仿真时边界条件别直接用完美匹配层,SPR传感需要金属-介质界面处的倏逝波
基于隐马尔可夫模型HMM的孤立字语音识别Matlab代码模板在语音识别领域,隐马尔可夫模型(HMM)占据着重要的地位。今天咱就来聊聊基于HMM的孤立字语音识别的Matlab代码模板,看看它是如何运作的。
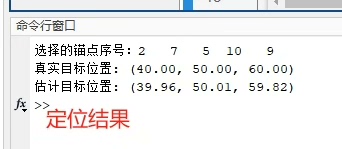
跑出来的效果像夜空中带尾巴的彗星,锚点和估计位置之间拖着紫色虚线。算法模拟了多个锚点的优选后,使用RSSI 测量来估计目标的三维位置。结果展示:输出真实位置、估计位置及所选锚点,并绘制三维图形。算法模拟了多个锚点的优选后,使用RSSI 测量来估计目标的三维位置。锚点选择:根据与真实目标的距离选择若干个锚点进行定位。锚点选择:根据与真实目标的距离选择若干个锚点进行定位。代码包含 100 次定位的迭代