




- @IHTY_NUI
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
深入分析simulink自动代码生成(code generation),拆解模型model与代码code的关系,解构代码文件的详细内容。以便更好的控制代码的生成。
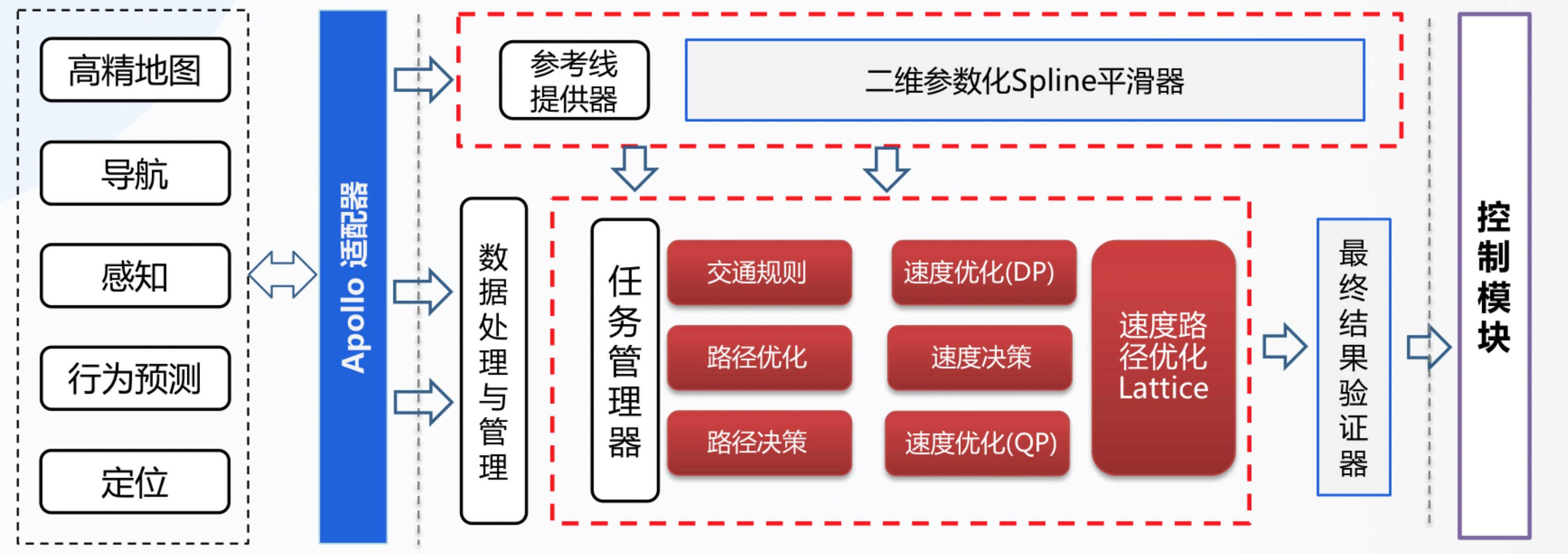
概述本文主要讲解决策规划模块中是如何生成参考线和行车轨迹供车辆行驶的,参考线和轨迹直接影响了自动驾驶车辆对于方向和速度的控制。reference line怎么生成出来的?和rounting啥关系?Apollo是使用A star算法。route模块里A*算法的实现:节点定义在modules/routing/graph/topo_node.h文件,graph目录下还有计算用到的边和图的定义。主要算法实
深入分析simulink自动代码生成(code generation),拆解模型model与代码code的关系,解构代码文件的详细内容。以便更好的控制代码的生成。
承接上一篇(控制教程 —— 介绍篇:1.建模)。 一旦获得了系统的状态空间或传递函数形式的数学模型,我们便可以分析这些模型来预测系统在时域和频域中的动态响应。通常将控制系统设计为高稳定性,高响应速度,低稳态误差,以及减小振荡。也就是“稳准快”。在本节中,我们将展示如何从系统模型中确定...
有些时候在生成代码后,可能需要和外部代码(如手写代码或其他工具生成的代码)进行集成,此时我们可做以下准备工作:确保模型输入输出接口正确确保入口函数可被调用多个模型生成的代码集成到一个工程里代码文件存储管理:代码打包、代码存放位置管理下面以官方提供的模型ETC_Controller为例说明模型输入输出接口如果模型中的input是从workspace中读取数据的,embedded coder是不会把这
概述搞了一段时间电机控制和车辆横纵向控制,发现好多人包括开发和标定工程师都只知道PID反馈控制可以比较有效的调整被控系统(如动力电机,转向系统,制动和动力系统)的工作性能,但都不知道其中的本质机理。关于这块儿我大致整理了一下自己的理解,写在本文中。水平有限,思路仅供参考。本文要解决的问题主要有两个:为何负反馈可以很好的消除误差,实现对目标信号的跟踪。PID为何能够调整被控系统的性能。便于理解,我想