




- @CHenCUan1
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
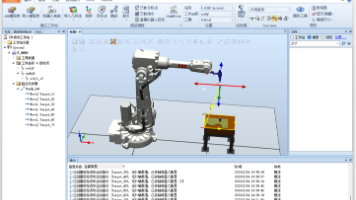
摘要:本实训以ABB RobotStudio 2023为仿真平台,完成工业机器人系统认知、虚拟工作站搭建、坐标系标定、基础运动控制与程序仿真全流程操作,系统掌握6轴工业机器人的机械结构、运动模式与控制逻辑,解决仿真过程中的软件安装、模型导入、运动控制等典型问题,为工业机器人实体操作与自动化产线设计奠定理论与实操基础。本文严格按照实训模板要求,从项目配置、核心模块、实操进展、故障排查、个人心得等维度
依托《工业机器人系统离线编程与仿真》课程项目四工业机器人激光切割工作站离线编程与仿真实训内容,带领学生在 RobotStudio6.08 软件平台完成从工作站搭建、轨迹创建、点位优化、仿真运行、碰撞监测、TCP 轨迹校验全流程实操。本项目选用 IRB2600 工业机器人搭载激光切割专用工具 MyTool,围绕钣金工件激光切割工艺开展离线编程实训,完整覆盖任务 4.1 至 4.4 四大模块实训内容。
本文结合ESP-IDF开发框架、LCD驱动实战笔记与机器人实训标准模板,从项目环境搭建、WIFI STA模式联网实现、云端天气数据获取解析,到LCD字符/图片驱动显示、网络时间同步,完整复盘ESP32 WIFI+LCD天气时间可视化系统的开发全流程。内容涵盖核心代码实现、实操避坑技巧、性能优化策略,既适配嵌入式入门者的实战学习,也可为机器人自动化实训、课程设计提供标准化开发思路。

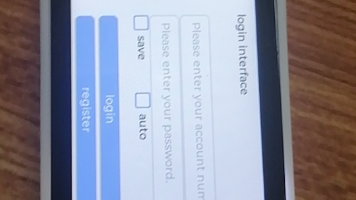
本文围绕 ESP32S3 机器人实训,基于 ESP-IDF 开发框架,完整阐述 LVGL9.4 图形库向 ESP32S3 的底层移植、GUI Guider 可视化界面开发及机器人场景功能落地全流程。内容涵盖开发环境与硬件准备、LVGL 标准化移植步骤、GUI Guider 安装与界面设计、代码移植落地、机器人场景实战及高频问题排查与优化。教程结合实训经验,所有代码与配置可直接复用到各类机器人实训项
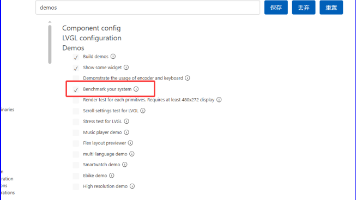
本文以ESP32S3开发板为基础,结合机器人实训开发要求,详述了LVGL9.4的移植流程、GUI Guider可视化开发方法及LVGL Bar组件的实战开发与机器人场景落地。文章先介绍开发环境与资源准备,按工程准备、组件拉取等步骤完成LVGL底层移植,再讲解GUI Guider的安装配置与界面绘制,重点基于LVGL百问网教程实现Bar组件的基础显示、触屏交互和定时器实时刷新,还完成了GUI Gui
摘要:本实训以ABB RobotStudio 2023为仿真平台,完成工业机器人系统认知、虚拟工作站搭建、坐标系标定、基础运动控制与程序仿真全流程操作,系统掌握6轴工业机器人的机械结构、运动模式与控制逻辑,解决仿真过程中的软件安装、模型导入、运动控制等典型问题,为工业机器人实体操作与自动化产线设计奠定理论与实操基础。本文严格按照实训模板要求,从项目配置、核心模块、实操进展、故障排查、个人心得等维度
本文结合ESP-IDF开发框架、LCD驱动实战笔记与机器人实训标准模板,从项目环境搭建、WIFI STA模式联网实现、云端天气数据获取解析,到LCD字符/图片驱动显示、网络时间同步,完整复盘ESP32 WIFI+LCD天气时间可视化系统的开发全流程。内容涵盖核心代码实现、实操避坑技巧、性能优化策略,既适配嵌入式入门者的实战学习,也可为机器人自动化实训、课程设计提供标准化开发思路。
本文以ESP32S3开发板为基础,结合机器人实训开发要求,详述了LVGL9.4的移植流程、GUI Guider可视化开发方法及LVGL Bar组件的实战开发与机器人场景落地。文章先介绍开发环境与资源准备,按工程准备、组件拉取等步骤完成LVGL底层移植,再讲解GUI Guider的安装配置与界面绘制,重点基于LVGL百问网教程实现Bar组件的基础显示、触屏交互和定时器实时刷新,还完成了GUI Gui
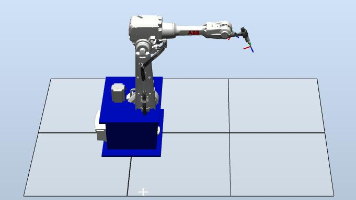
为解决传统工业机器人在线示教存在的停机时间长、调试效率低、安全风险高及轨迹精度不足等问题,本项目以 ABB RobotStudio 为核心平台,选用 IRB 2600 工业机器人,完整构建模拟焊接轨迹仿真工作站。项目涵盖工作站布局、模型导入与装配、控制系统搭建、工件坐标系标定、运动轨迹示教与仿真调试等全流程,运用 RAPID 语言实现运动控制,重点解析 MoveJ、MoveL 等核心指令,梳理并解
为解决传统工业机器人在线示教存在的停机时间长、调试效率低、安全风险高及轨迹精度不足等问题,本项目以 ABB RobotStudio 为核心平台,选用 IRB 2600 工业机器人,完整构建模拟焊接轨迹仿真工作站。项目涵盖工作站布局、模型导入与装配、控制系统搭建、工件坐标系标定、运动轨迹示教与仿真调试等全流程,运用 RAPID 语言实现运动控制,重点解析 MoveJ、MoveL 等核心指令,梳理并解