




- @Ango_
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
Unet网络Unet是一种编码-解码结构相结合的神经网络结构,是一种语义分割网络。在医学图像分割的相关应用中被广泛使用。使用matlab可以快速实现网络结构的定义和训练。数据集准备准备待训练图像和相对应的标注图像,将图像和标注图像分别存放到不同的目录中,通过相同的文件名进行一一对应。%% 数据集加载dataSetDir = fullfile('./data');imageDir = fullfil
GoCVGoCV是go语言版的opencv封装,基于opencv4.0+项目地址:https://gocv.io/环境配置配置可参考官网教程https://gocv.io/getting-started/windows/OpenCV编译过程中opencv是需要我们自己编译的,opencv的编译将耗时1个小时左右。可以从这里下载我编译好的版本直接使用:https://downloa...
clear;clc;%% 加载训练好的Alex网络alex = alexnet;layers = alex.Layers;%% 修改网络结构,类别改为两类layers(23) = fullyConnectedLayer(2);layers(25) = classificationLayer;%% 设置训练数据allImages = imageDatastore('E:\CodeProjects\M
LeNet5 介绍LeNet通常就指LeNet5,该网络诞生于1998年,作者是Yann LeCun,当初被设计用来识别手写数字,是最早的CNN网络之一,被后续学者奉为经典,该论文的下载地址 http://citeseerx.ist.psu.edu/viewdoc/download;jsessionid=054E02BBBFEFE6B1C98D119DC503F6A7?doi=10.1.1.42.
Unet网络Unet是一种编码-解码结构相结合的神经网络结构,是一种语义分割网络。在医学图像分割的相关应用中被广泛使用。使用matlab可以快速实现网络结构的定义和训练。数据集准备准备待训练图像和相对应的标注图像,将图像和标注图像分别存放到不同的目录中,通过相同的文件名进行一一对应。%% 数据集加载dataSetDir = fullfile('./data');imageDir = fullfil
一、内存泄漏是什么内存泄漏,是指在程序代码中动态申请的、堆上的内存 由于某种原因、在使用后没有被释放,进而造成内存的浪费。少部分的内存泄漏不会影响程序的正常运行,不过如果是持续的内存泄漏会耗光系统内存,最终会导致程序卡死甚至系统崩溃。为了避免系统崩溃,在无法申请到内存的时候,要果断调用exit()函数主动杀死进程,而不是试图挽救这个进程。二、如何察觉到它如果程序在正常地使用过程中,占用的内存随着时
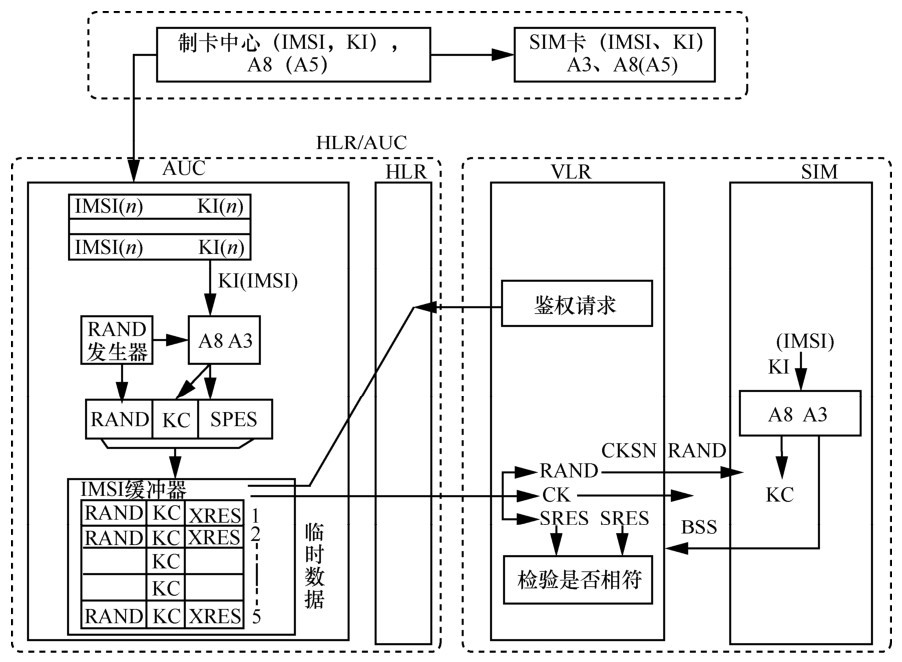
通信网的身份认证运营商移动通信网的接入认证是蜂窝通信的服务基础,为用户接入通信网提供了基础的准入保障。纵观历代移动通信网鉴权技术,从鉴权方向上看主要是两大类:单向鉴权→双向鉴权。这里的单向鉴权主要指通信网络对用户的鉴权,而不是反过来;双向鉴权就是用户和移动通信网络双向鉴权。一,2G时代的认证与鉴权第一代模拟通信系统(就是常见的大哥大),基本上是没有安全防护机制的。到了2G GSM时代,模拟通信系统
ARM架构下部署docker1 环境要求2 安装与配置docker2.1 下载Docker静态包2.2 移值docker静态包以及组件2.3 配置docker.service文件2.4 安装后操作2.4 验证docker安装2.5 卸载docker3 故障排查1环境要求类型项目要求硬件服务器Taishan 200 2280服务器硬件CPU...