




- @2401_87626114
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
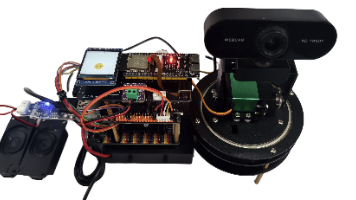
本文介绍了一个基于ESP32S3+RDKX5架构的智能语音监管机器人系统。该系统整合了语音交互、视觉识别、云端大模型分析、人脸追踪等功能,主要由三个模块组成:ESP32S3语音控制模块、RDKX5计算核心和电源管理模块。文章详细阐述了硬件组成、人脸追踪逻辑、驾驶行为监管模块、UART控制机制以及系统调试要点。该系统通过串口指令实现模块间通信,采用共享图片方式解决多进程摄像头抢占问题,并设计了完善的
本文详细介绍了在NVIDIA Jetson Nano(4GB)上部署Qwen轻量化大语言模型的全过程。针对JetPack 4.6.x系统与LLM生态的兼容性问题,作者通过系统优化(创建4GB Swap空间、关闭图形界面)、升级CMake至3.28+、锁定GCC 8编译器版本等技术手段,成功在资源受限的边缘设备上运行模型。重点解决了编译过程中的Segmentation fault、CUDA初始化失败
这是一个基于SpringBoot+Vue3的前后端分离项目,包含驾驶员信息管理、可视化仪表盘和AI助手三大功能模块。项目采用Java21+MySQL8后端技术栈和Vue3+Vite前端架构,集成阿里云DashScope大模型提供智能问答服务。特色功能包括:50条示例驾驶员数据管理、多图表联动可视化展示(含全国/重庆地图)、具备自动摘要注入的AI助手(支持打字机效果、聊天记录操作等)。项目提供完整的

本文详细介绍了在NVIDIA Jetson Nano(4GB)上部署Qwen轻量化大语言模型的全过程。针对JetPack 4.6.x系统与LLM生态的兼容性问题,作者通过系统优化(创建4GB Swap空间、关闭图形界面)、升级CMake至3.28+、锁定GCC 8编译器版本等技术手段,成功在资源受限的边缘设备上运行模型。重点解决了编译过程中的Segmentation fault、CUDA初始化失败
本文介绍了一种基于小智AI语音助手的低成本智能小车控制方案。使用ESP32开发套件搭配L298N电机驱动模块,通过GPIO口实现语音控制小车的运动。文章详细说明了硬件连接方式,包括电机与ESP32的引脚映射关系,并解释了为何需要L298N模块来实现"低压控制高压"的驱动原理。重点介绍了如何在小智AI源代码中添加小车控制功能模块,包括电机初始化、基本运动控制(前进、后退、转向等)

本文介绍了一种基于小智AI语音助手的低成本智能小车控制方案。使用ESP32开发套件搭配L298N电机驱动模块,通过GPIO口实现语音控制小车的运动。文章详细说明了硬件连接方式,包括电机与ESP32的引脚映射关系,并解释了为何需要L298N模块来实现"低压控制高压"的驱动原理。重点介绍了如何在小智AI源代码中添加小车控制功能模块,包括电机初始化、基本运动控制(前进、后退、转向等)
这是一个基于SpringBoot+Vue3的前后端分离项目,包含驾驶员信息管理、可视化仪表盘和AI助手三大功能模块。项目采用Java21+MySQL8后端技术栈和Vue3+Vite前端架构,集成阿里云DashScope大模型提供智能问答服务。特色功能包括:50条示例驾驶员数据管理、多图表联动可视化展示(含全国/重庆地图)、具备自动摘要注入的AI助手(支持打字机效果、聊天记录操作等)。项目提供完整的
本文详细介绍了在NVIDIA Jetson Nano(4GB)上部署Qwen轻量化大语言模型的全过程。针对JetPack 4.6.x系统与LLM生态的兼容性问题,作者通过系统优化(创建4GB Swap空间、关闭图形界面)、升级CMake至3.28+、锁定GCC 8编译器版本等技术手段,成功在资源受限的边缘设备上运行模型。重点解决了编译过程中的Segmentation fault、CUDA初始化失败
本文介绍了一种基于小智AI语音助手的低成本智能小车控制方案。使用ESP32开发套件搭配L298N电机驱动模块,通过GPIO口实现语音控制小车的运动。文章详细说明了硬件连接方式,包括电机与ESP32的引脚映射关系,并解释了为何需要L298N模块来实现"低压控制高压"的驱动原理。重点介绍了如何在小智AI源代码中添加小车控制功能模块,包括电机初始化、基本运动控制(前进、后退、转向等)
本文介绍了一种基于小智AI语音助手的低成本智能小车控制方案。使用ESP32开发套件搭配L298N电机驱动模块,通过GPIO口实现语音控制小车的运动。文章详细说明了硬件连接方式,包括电机与ESP32的引脚映射关系,并解释了为何需要L298N模块来实现"低压控制高压"的驱动原理。重点介绍了如何在小智AI源代码中添加小车控制功能模块,包括电机初始化、基本运动控制(前进、后退、转向等)