- @2302_78022640
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
收集至少 5~10 张/人的多光照、多表情照片(LBPH 少量也能用)。用级联/关键点检测裁切并对齐人脸,转为灰度并统一尺寸(如 200×200)。做直方图均衡或其他归一化。按目录加载数据,构建。选择识别器(LBPH/Eigen/Fisher),进行train()。使用验证集调参并设定confidence阈值。save()模型与 label 映射。部署时read()模型,并在实时流中检测 -> 预
该类通过文本文件(如train2.txt)加载图片路径和标签。使用交叉熵损失函数处理多分类任务,优化器为Adam。模块作用特点ResNet18特征提取主干使用 ImageNet 预训练权重Dataset读取图片与标签支持 transform 自动增强DataLoader批量化输入shuffle 提升训练效果train()前向传播与反向传播更新梯度Test()模型评估计算平均损失与准确率学习率调整自
颜色识别的关键在于颜色空间的选择与阈值判定。人类的颜色感知主要由色调(Hue)、饱和度(Saturation)与亮度(Value)决定。OpenCV 默认读取的图像为BGR(蓝绿红)模式,但这种模式不利于分离颜色信息,因此通常将其转换为HSV 颜色空间。H(Hue)色调表示颜色的种类(0~180,对应红、橙、黄、绿、青、蓝、紫等色带)。S(Saturation)饱和度表示颜色的纯度,越高颜色越鲜艳
分类问题中,默认的0.5阈值并不是“黄金标准”。针对具体业务目标(是否强调召回率/精确率),我们可以:自定义分类阈值,寻找最佳的性能平衡点;深度解读 Precision、Recall、F1-score,避免被“Accuracy”误导;借助混淆矩阵,全景化理解模型的预测行为;结合快速输出各类指标。
眼睛纵横比(EAR)由Soukupová 和 Čech 提出,基于眼睛的 6 个关键点位置计算。EAR 的优点在于:计算量小、对头部轻微转动具有鲁棒性、实时性好。其计算公式为:其中 p1~p6 为眼睛轮廓的 6 个关键点(见文中代码注释)。当眼睛闭合时,EAR 会显著下降;通过对连续帧的 EAR 设阈值与持续帧数,可以区分瞬时眨眼与真正的闭眼(疲劳/打瞌睡)。基于 EAR 的疲劳检测是一条工程上可
直方图是分析图像亮度分布的重要工具,而直方图均衡化能够有效提升图像对比度。全局均衡化简单高效,但可能会损失局部细节;自适应直方图均衡化(CLAHE)通过分块处理,可以更好地保留局部细节,增强效果更自然。通过本文及代码演示,可以直观理解直方图均衡化的原理与实际效果,掌握其在图像增强中的应用。要不要我帮你画一张示意图,展示直方图均衡化前后灰度分布的变化(比如用两张直方图对比)?这样文章会更直观。
贝叶斯分类器基于贝叶斯定理其中:P(A∣B):在 B 发生的情况下 A 发生的概率(后验概率)P(B∣A):在 A 发生的情况下 B 发生的概率(似然)P(A):事件 A 的概率(先验概率)P(B):事件 B 的概率(边缘概率)鸢尾花数据集是机器学习中的经典数据集,包含 150 条数据,分为三类鸢尾花(Setosa、Versicolor、Virginica),每条数据有四个特征:萼片长度(sepa
原理:深度学习——详细教学:神经元、神经网络、感知机、激活函数、损失函数、优化算法(梯度下降)-CSDN博客。
图像风格迁移(Neural Style Transfer)是计算机视觉中非常有趣的一个应用,它能够将一张图像的风格“迁移”到另一张图像上,比如把摄像头捕获的视频实时转换为梵高的《星空》风格。本篇文章将通过 OpenCV 的dnn模块和预训练的 Torch 模型,来实现。
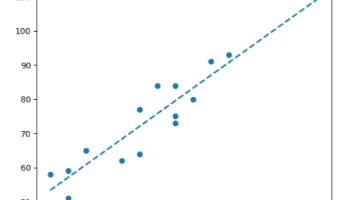
线性回归是回归分析的入门基础;使用可以快速构建模型;可以可视化预测结果和分析模型性能;推荐在实际应用中注重数据预处理、特征选择与残差分析。