




- @2301_80635989
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
昇腾芯片运行在 GHz 频率,它的信号回流非常“挑剔”。如果你接的“随便个地”(比如金属外壳或不相连的屏蔽罩)到芯片主地的电阻太大,或者存在感抗,1.8V 这种极其微弱的信号就会淹没在噪声里。很多板子的金属外壳(如果你接的是外壳)和电路板内部的信号地(Digital GND)是通过电容耦合或者压敏电阻连接的,它们在直流电上可能是不通的,或者是高阻态。如果你的 OLED 屏幕的地和板子处理器参考的地
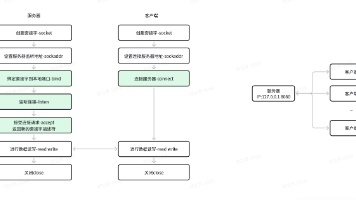
Socket通信是网络设备间数据传输的基础方式,通过IP地址和端口号组合实现。它采用客户端-服务器模型:服务器监听端口等待连接,客户端主动发起请求。通信过程类似于电话系统,建立连接后双方可交换数据。Socket支持TCP(可靠连接)和UDP(快速传输)两种协议,广泛应用于HTTP、MQTT等网络协议底层。TCP/IP五层模型展示了Socket在网络协议栈中的位置(介于传输层与应用层之间)。开发中通
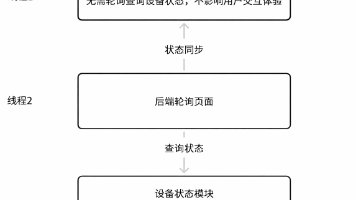
本文介绍了Linux系统中进程与线程的区别及多线程编程的核心概念。通过餐厅场景类比,阐释了进程作为独立部门、线程作为部门内员工的差异,突出线程资源共享和轻量级调度的优势。详细讲解了pthread库的关键函数(创建、等待、退出、取消线程)和线程同步机制(互斥锁、条件变量),并提供了生产者-消费者模型的完整代码示例。特别强调多进程共享互斥锁的复杂性,建议优先使用信号量进行进程间同步。文章最后通过定时刷
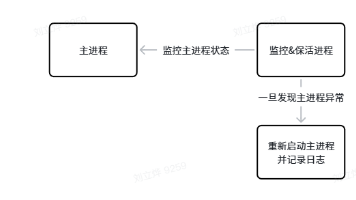
本文介绍了Linux进程的基本概念、特点及管理方法。进程是运行中的程序实例,拥有独立资源,具有动态性、独立性、并发性和异步性等特点。文章对比了程序与进程的区别,阐述了父子进程关系,并详细讲解了进程创建(fork)、终止(exit)和监控(waitpid)等核心函数。通过示例代码演示了如何创建子进程、执行新程序(exec系列函数),并实现了一个保活进程监控方案,能够自动重启异常终止的子进程。最后介绍
我开源了一个面向 ROS 1 / ROS 2 机器人开发、迁移与联调 的工程化 Skill:ros-robotics-skill。它不是泛泛的提示词包,而是围绕工作区识别、TF 排障、Nav2 联调、ros2_control、QoS、多机器人、micro-ROS 协同等真实工程场景设计的 AI 工作流。项目支持 Codex、Claude Code、Gemini CLI,提供专题文档、检查脚本、真实
我开源了一个面向 ROS 1 / ROS 2 机器人开发、迁移与联调 的工程化 Skill:ros-robotics-skill。它不是泛泛的提示词包,而是围绕工作区识别、TF 排障、Nav2 联调、ros2_control、QoS、多机器人、micro-ROS 协同等真实工程场景设计的 AI 工作流。项目支持 Codex、Claude Code、Gemini CLI,提供专题文档、检查脚本、真实