
ROS 开发者必看:一个覆盖 TF / Nav2 / QoS / 多机器人 的开源 Skill
我开源了一个面向 ROS 1 / ROS 2 机器人开发、迁移与联调 的工程化 Skill:ros-robotics-skill。它不是泛泛的提示词包,而是围绕工作区识别、TF 排障、Nav2 联调、ros2_control、QoS、多机器人、micro-ROS 协同等真实工程场景设计的 AI 工作流。项目支持 Codex、Claude Code、Gemini CLI,提供专题文档、检查脚本、真实
通用 AI 真的懂 ROS 吗?我把联调经验做成了一个开源 Skill
这不是一个泛泛的提示词包,而是一套面向 ROS 1 / ROS 2 机器人开发、迁移与联调 的工程化工作流。我想做的,不是让 AI 看起来更聪明,而是让它在真实机器人项目里,少走弯路、少制造误判、真正帮到开发者。
这段时间,我把自己在 ROS 开发、导航联调、控制链路排查、TF 调试、多机器人协同以及嵌入式协同里的经验,整理成了一个开源项目:
ros-robotics-skill
项目地址:
https://github.com/wzyn20051216/ros-robotics-skill
很多朋友第一次看到这个项目时,会下意识把它理解成一个“提示词仓库”。
但实际上,我做它的出发点,并不是为了堆提示词,而是想解决一个更具体、也更现实的问题:
通用 AI 很会写代码,但不一定真的懂 ROS 联调
做过 ROS 项目的人大多都知道,机器人开发里最麻烦的问题,往往不是“代码写错了”这么简单。
很多时候,问题真正出在这些地方:
- 一开始就没分清
catkin、ament和colcon,工作区判断从源头就偏了; - 一看到报错就急着改业务代码,却没有先排查 TF、frame、时间戳、单位和资源安装;
- Nav2 明明已经激活,但底盘就是不动,不知道该先查控制链路、反馈链路还是
/cmd_vel; - topic 丢帧看起来像节点异常,根因却可能只是 QoS 不兼容;
- 一提到 MCU 就默认建议上
micro-ROS,但很多时候 Linux 侧桥接反而更简单、更稳。
这些问题的共同点在于:
它们不是单点代码问题,而是工程上下文问题。
如果 AI 没有这些上下文,就很容易给出一种“看起来像正确建议”的动作:
直接改代码。
但做过真实联调的人都知道,这恰恰是最危险的起点。
我想做的,不是更多提示词,而是更接近现场的工作流
ros-robotics-skill 的目标,从来不是把项目包装成“万能 AI 提示合集”。
我更在意的是:当 AI 处理 ROS 问题时,能不能像一个真正理解现场的人一样,先按工程逻辑做判断。
比如:
- 先识别工作区类型,再决定构建与排查路径;
- 先查依赖、安装规则和 launch 资源,再判断是不是代码问题;
- 先排 TF、时间戳、frame、QoS、控制链路,再决定是否动业务逻辑;
- 先判断 Linux 侧桥接是否更合适,再讨论要不要引入
micro-ROS。
这类顺序听起来并不“炫技”,但恰恰最有工程价值。
因为真正决定联调效率的,往往不是你会不会写更多代码,而是你有没有从一开始就沿着正确路径收敛问题。

这个 Skill 到底沉淀了什么?
目前这个仓库已经不只是“一个 SKILL.md 文件”,而是逐渐整理出一套更完整的工程内容。
1. 专题参考文档
仓库目前已经覆盖多个 ROS 高频主题,包括:
- ROS 1 / ROS 2 / mixed workspace
- URDF / Xacro / TF / RViz
- Navigation2
ros2_control- DDS / QoS / 多机网络
- 多机器人命名空间隔离
- SLAM / Docker / Gazebo / MoveIt 2
micro-ROS与嵌入式协同- Foxglove 可视化与离线分析
这部分内容的意义,并不是“把知识点堆得更全”,而是尽量让 AI 在不同场景里,有更准确的参考上下文。
2. 检查脚本与辅助工具
除了参考文档,仓库里还提供了几类实用脚本,比如:
- 工作区识别脚本
- 依赖与安装规则一致性检查脚本
- TF 树完整性离线检查脚本
这些脚本的价值,在于它们不是只给出“猜测”,而是尽量帮你把问题缩小到更真实的范围。
3. 真实案例与最小工作区
仓库里目前已经整理了 8 个真实案例,包括:
- ROS 1
catkin_ws构建失败 - 模型能加载但 TF / RViz 异常
- Nav2 已激活但底盘不动
- QoS 不兼容导致 topic 丢帧
- Docker 中 ROS 2 无法发现节点
- SLAM 建图漂移严重
- Lifecycle 节点状态转换失败
- 多机器人命名空间冲突
同时,还提供了一个可以直接 colcon build 的最小 ROS 2 示例工作区,方便快速理解整个 skill 的使用方式。
为什么我觉得“工作流”比“答案”更重要?
因为在机器人系统里,真正困难的从来都不是“写一段代码”,而是:
- 判断问题到底落在哪一层;
- 按顺序排查,而不是同时怀疑一切;
- 小步修改,小范围验证;
- 最后把修复动作沉淀成以后还可以重复使用的方法。
我更希望 ros-robotics-skill 做成这样一种工具:
它不只是帮你回答,而是帮你判断、帮你收敛、帮你验证。
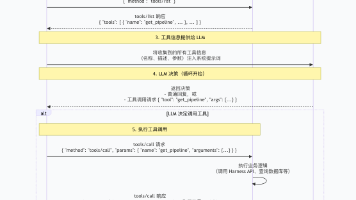
下面这张图,就是我想让这个项目持续沉淀的核心思路:
一个更贴近真实工程的问题例子
如果你做过 Nav2 联调,应该很熟悉一种特别“折磨人”的情况:
路径已经出来了,机器人却完全不走。
这类问题最容易把人带偏。
因为表面上看,它像是导航没生效;但真正的根因,可能在控制器参数、底盘接口、控制链路、反馈频率、话题桥接甚至 TF 连续性上。
如果这时候 AI 没有场景意识,很容易建议你“重写节点”“修改业务逻辑”甚至“换一套导航配置”。
但实际上,很多时候真正需要的,是先把链路拆开,一段段验证:
- Nav2 是否真的处于 active 状态;
- 控制器输出是否已发到正确话题;
- 底盘是否真的订阅到了控制命令;
- 反馈链路是否完整;
- TF 与时间同步是否稳定;
- QoS 是否存在隐藏的不兼容。
这也是为什么我想把真实案例写进 skill:
因为机器人问题,很多时候不是“会不会写”,而是“会不会查”。
它支持哪些工具?怎么接入?
目前这个项目已经适配:
- Codex
- Claude Code
- Gemini CLI
如果你已经在使用 Skills CLI,可以直接通过下面的命令安装:
npx skills add https://github.com/wzyn20051216/ros-robotics-skill -g -y
如果你更习惯一键安装,仓库里也提供了对应脚本。
从我自己的目标来看,我很希望它做到两件事:
- 让已经在做 ROS 项目的人更快进入正确排障顺序;
- 让刚接触 ROS 的人少踩一些本可以避免的坑。

这个项目适合谁?
如果你符合下面任意一种情况,我觉得这个项目都值得你看看:
- 正在学习 ROS / ROS 2 的学生;
- 机器人实验室或项目组成员;
- 做导航、控制、仿真、联调的工程师;
- 想把 AI 真正用进机器人研发流程的人;
- 正在做 MCU、RTOS、串口、CAN 与 ROS 协同开发的人。
最后
我越来越觉得,未来真正有价值的 AI 工程方式,不是让模型“看起来无所不知”,而是让它在垂直领域里,拥有更可靠的判断顺序、更贴近现场的上下文,以及更能落地的验证闭环。
ros-robotics-skill 对我来说,就是这样一次尝试。
它不是为了取代工程师,也不是为了制造“更会说”的 AI,而是希望把那些原本只存在于个人经验、排障直觉和项目复盘里的东西,慢慢沉淀为一套可以复用、可以传递、也可以被 AI 正确调用的工作流。
如果你也在做 ROS、机器人、导航、控制、仿真、多机器人或者嵌入式协同开发,欢迎来看看这个项目,也欢迎一起交流。
项目地址:
https://github.com/wzyn20051216/ros-robotics-skill
如果你觉得这个方向值得继续做下去,也欢迎点一个 Star 支持一下。
文末互动引导
你在 ROS 开发里最常踩的坑是什么?
如果下一篇继续写,你更想看:
TF / Nav2 / QoS典型问题拆解ros2_control联调思路- 多机器人命名空间设计
micro-ROS与 Linux 侧桥接取舍- 这个 skill 的目录结构与工作流设计
欢迎留言交流。

小龙虾开发者社区是 CSDN 旗下专注 OpenClaw 生态的官方阵地,聚焦技能开发、插件实践与部署教程,为开发者提供可直接落地的方案、工具与交流平台,助力高效构建与落地 AI 应用
更多推荐

 9
9 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)