
《智能体设计模式》从零基础入门到精通,看这一篇就够了!
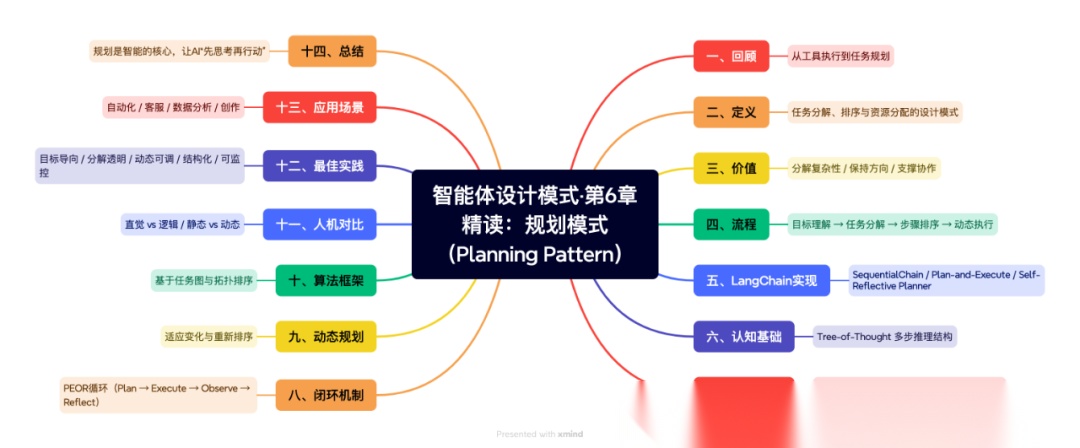
文章详细介绍了AI智能体设计模式中的规划模式,这是让AI"先思考再行动"的关键机制。通过目标理解、任务分解、步骤排序和执行调整四个阶段,AI能分解复杂任务、保持方向一致性并进行动态优化。文章还探讨了LangChain实现、思维树、Google ADK规划引擎等内容,强调规划模式是智能体从"指令执行"迈向"理性决策"的转折点,是实现真正AI智能的基础。“智能不只是做事的能力,更是知道先做什么、后做什
文章详细介绍了AI智能体设计模式中的规划模式,这是让AI"先思考再行动"的关键机制。通过目标理解、任务分解、步骤排序和执行调整四个阶段,AI能分解复杂任务、保持方向一致性并进行动态优化。文章还探讨了LangChain实现、思维树、Google ADK规划引擎等内容,强调规划模式是智能体从"指令执行"迈向"理性决策"的转折点,是实现真正AI智能的基础。
“智能不只是做事的能力,更是知道先做什么、后做什么。” —— Antonio Gulli,《智能体设计模式》
一、回顾:从工具到计划
在第五章中,我们让AI第一次“动了起来”——
通过工具模式(Tool Pattern),它能调用API、执行函数、操纵现实世界。
但新的问题马上出现:
“AI知道怎么做,但它知道先做哪一步、后做哪一步吗?”
举个例子,用户说:
“帮我制定一份明天早上去上海出差的计划。”
AI需要做的不只是回答,而是要:
1️⃣ 查询航班/高铁;
2️⃣ 安排出发时间;
3️⃣ 预订酒店;
4️⃣ 发送行程通知。
如果没有规划机制(Planning Pattern),
AI 只能盲目顺序执行任务,缺乏全局视角。
📘 所以——规划模式,就是智能体的“前额叶皮层”。
二、什么是规划模式?
Antonio Gulli 给出的定义是:
规划模式(Planning Pattern)是指智能体在执行任务前,通过目标分解、步骤排序和资源分配,生成可执行的任务计划的设计模式。
简单说:
它是“让AI先想清楚再去干”的机制。
📘 类比人类行为:
Planning 就像我们写 To-Do List,
先理清目标,再一步步完成。
三、为什么需要规划模式?
规划是智能与反应的分界线。
没有规划,AI只是“条件反射”;
有了规划,它就能“思考未来”。
书中总结了规划模式的三大价值👇
| 维度 | 含义 | 说明 |
|---|---|---|
| 🧩 分解复杂性 | 把大任务拆成小步骤 | 从“做项目”到“执行清单” |
| 🧭 保持方向一致性 | 避免中途偏航 | 每步都为目标服务 |
| ⚙️ 可调度与优化 | 便于多Agent协同与资源分配 | 规划是Orchestration的基础 |
📘 如果说 Tool Pattern 是“手”,
那 Planning Pattern 就是“行动地图”。
四、规划模式的工作流程
书中将 Planning Pattern 分为四个关键阶段👇
目标输入 → 任务分解 → 步骤排序 → 执行与调整
| 阶段 | 说明 | 代表能力 |
|---|---|---|
| 1️⃣ 目标理解(Goal Understanding) | 提取核心意图与终点目标 | NLP解析 + 语义分析 |
| 2️⃣ 任务分解(Task Decomposition) | 将目标拆解为可执行步骤 | 思维链 / Tree-of-Thought |
| 3️⃣ 步骤排序(Ordering & Scheduling) | 规划顺序与依赖关系 | 优先级算法 / 拓扑排序 |
| 4️⃣ 执行调整(Execution & Adaptation) | 动态执行与反馈修正 | Reactive Pattern 支撑 |
📘 规划并非一次性生成,而是动态调整的过程。
五、LangChain 的 Planning 实现
LangChain 提供了多种规划机制:
| 模式 | 特点 | 适用场景 |
|---|---|---|
| SequentialChain | 固定线性任务链 | 明确流程型任务 |
| Plan-and-Execute Agent | 拆解→执行→反思 | 通用任务执行 |
| Self-Reflective Planner | 动态调整计划 | 多步探索任务 |
示例👇
from langchain.agents import load_tools, initialize_agent
from langchain.llms import OpenAI
tools = load_tools(["search", "llm-math"])
llm = OpenAI(temperature=0)
agent = initialize_agent(
tools, llm, agent_type="plan-and-execute", verbose=True
)
agent.run("为公司撰写一篇关于AI发展的公众号文章,并生成封面图。")
📘 这段代码展示了经典“Plan & Execute”结构:
AI 会先生成详细计划,再逐步执行每个步骤。
六、规划的认知基础:思维树(Tree-of-Thought)
Antonio Gulli 在本章特别强调:
“规划模式的本质,是让AI具备多步推理能力。”
这在技术上常以 Tree-of-Thought(ToT) 实现👇
Goal: 写一篇AI趋势报告
├── Step 1: 搜集数据
│ ├── Search industry reports
│ └── Crawl recent news
├── Step 2: 分析趋势
│ ├── Identify key metrics
│ └── Summarize core patterns
└── Step 3: 撰写与发布
├── Generate draft
└── Publish article
📘 这棵“思维树”让AI不再线性思考,而是分支探索、动态选择最优路径。
七、Google ADK 的任务规划引擎
在Google ADK(Agent Developer Kit)中,
规划模式是系统的核心模块之一——Task Planning Engine。
它包含以下组件👇
| 模块 | 功能 |
|---|---|
| Goal Interpreter | 理解任务目标与意图 |
| Task Decomposer | 生成任务树与依赖关系 |
| Plan Synthesizer | 输出执行计划(含时间/资源) |
| Adaptive Executor | 根据反馈动态更新计划 |
📘 这让AI具备“项目管理者”的能力,而非“执行员”的思维。
八、规划与执行的闭环
规划并不等于执行完成。
真正强大的Agent会建立 计划—执行—反馈—再计划 的循环:
Plan → Execute → Observe → Reflect → Replan
这被称为PEOR循环(Planning-Execution-Observation-Reflection)。
九、动态规划与情境感知
书中提到一个常见陷阱:
“静态规划无法适应动态环境。”
因此智能体需要具备Adaptive Planning能力:
| 变化 | 应对机制 |
|---|---|
| 用户需求变化 | 自动重构任务树 |
| 工具调用失败 | 替换策略或延迟任务 |
| 外部环境更新 | 实时重排执行顺序 |
📘 这与后续的 Reactive Pattern(反应模式) 联动,
让AI“边走边计划”。
十、规划模式的算法核心
书中给出一个典型的规划算法框架👇
def plan_task(goal):
subtasks = decompose(goal)
dependencies = build_dependency_graph(subtasks)
ordered_plan = topological_sort(dependencies)
return ordered_plan
📘 这一逻辑结合了图算法(Graph-based Planning)与语义分析,
是AI规划器的通用骨架。
十一、与人类规划的对比
| 特征 | 人类规划 | AI规划 |
|---|---|---|
| 🧠 思维模式 | 直觉+经验 | 逻辑+数据 |
| 🗂️ 工具支持 | 清单、图表 | Prompt、API、Agent Graph |
| 🔁 动态调整 | 基于情境反思 | 基于反馈循环 |
| 🎯 优化目标 | 时间效率 | 奖励函数 / 成功率 |
📘 二者结合时,能形成“人机共策”的新型智能体系。
十二、最佳实践
Antonio Gulli 在章节末总结了五条设计原则👇
| 原则 | 含义 |
|---|---|
| ① 目标导向(Goal-Driven) | 所有计划都应服务最终目标 |
| ② 分解透明(Decomposable) | 每步计划应可解释、可执行 |
| ③ 动态可调(Adaptive) | 支持实时反馈与重新规划 |
| ④ 结构化输出(Structured Plan) | 输出应为可追踪任务树 |
| ⑤ 可监控(Observable) | 每步进度可记录与可评估 |
📘 这些原则奠定了智能体工程化规划的底层规范。
十三、现实应用场景
| 场景 | 示例 | 说明 |
|---|---|---|
| 🧠 任务自动化 | AutoGPT、CrewAI | 多步任务拆解执行 |
| 💬 智能客服 | 多轮问题诊断 | 先分析问题 → 查询资料 → 给出方案 |
| 📊 数据分析 | AI分析师 | 拆解成采集、处理、可视化步骤 |
| 💡 内容创作 | AI Writer | 规划文章结构与生成顺序 |
📘 规划模式几乎存在于所有高层智能体应用中。
十四、总结:让AI“先思考再行动”
规划模式(Planning Pattern)是智能体从“指令执行”迈向“理性决策”的转折点。
它让AI:
- 拥有了目标感;
- 能够分解复杂任务;
- 在执行中保持全局一致性;
- 甚至能在变化中自我调整。
“行动的力量来自计划的清晰。”
📘 没有Planning,就没有真正的智能。
#智能体 #设计模式 #规划模式 #Planning #Agent
如何学习AI大模型 ?
“最先掌握AI的人,将会比较晚掌握AI的人有竞争优势”。
这句话,放在计算机、互联网、移动互联网的开局时期,都是一样的道理。
我在一线互联网企业工作十余年里,指导过不少同行后辈。帮助很多人得到了学习和成长。
我意识到有很多经验和知识值得分享给大家,故此将并将重要的AI大模型资料包括AI大模型入门学习思维导图、精品AI大模型学习书籍手册、视频教程、实战学习等录播视频免费分享出来。【保证100%免费】🆓
CSDN粉丝独家福利
这份完整版的 AI 大模型学习资料已经上传CSDN,朋友们如果需要可以扫描下方二维码&点击下方CSDN官方认证链接免费领取 【保证100%免费】
读者福利: 👉👉CSDN大礼包:《最新AI大模型学习资源包》免费分享 👈👈
对于0基础小白入门:
如果你是零基础小白,想快速入门大模型是可以考虑的。
一方面是学习时间相对较短,学习内容更全面更集中。
二方面是可以根据这些资料规划好学习计划和方向。
👉1.大模型入门学习思维导图👈
要学习一门新的技术,作为新手一定要先学习成长路线图,方向不对,努力白费。
对于从来没有接触过AI大模型的同学,我们帮你准备了详细的学习成长路线图&学习规划。可以说是最科学最系统的学习路线,大家跟着这个大的方向学习准没问题。(全套教程文末领取哈)
👉2.AGI大模型配套视频👈
很多朋友都不喜欢晦涩的文字,我也为大家准备了视频教程,每个章节都是当前板块的精华浓缩。

👉3.大模型实际应用报告合集👈
这套包含640份报告的合集,涵盖了AI大模型的理论研究、技术实现、行业应用等多个方面。无论您是科研人员、工程师,还是对AI大模型感兴趣的爱好者,这套报告合集都将为您提供宝贵的信息和启示。(全套教程文末领取哈)

👉4.大模型实战项目&项目源码👈
光学理论是没用的,要学会跟着一起做,要动手实操,才能将自己的所学运用到实际当中去,这时候可以搞点实战项目来学习。(全套教程文末领取哈)
👉5.大模型经典学习电子书👈
随着人工智能技术的飞速发展,AI大模型已经成为了当今科技领域的一大热点。这些大型预训练模型,如GPT-3、BERT、XLNet等,以其强大的语言理解和生成能力,正在改变我们对人工智能的认识。 那以下这些PDF籍就是非常不错的学习资源。(全套教程文末领取哈)
👉6.大模型面试题&答案👈
截至目前大模型已经超过200个,在大模型纵横的时代,不仅大模型技术越来越卷,就连大模型相关的岗位和面试也开始越来越卷了。为了让大家更容易上车大模型算法赛道,我总结了大模型常考的面试题。(全套教程文末领取哈)
为什么分享这些资料?
只要你是真心想学AI大模型,我这份资料就可以无偿分享给你学习,我国在这方面的相关人才比较紧缺,大模型行业确实也需要更多的有志之士加入进来,我也真心希望帮助大家学好这门技术,如果日后有什么学习上的问题,欢迎找我交流,有技术上面的问题,我是很愿意去帮助大家的!
这些资料真的有用吗?
这份资料由我和鲁为民博士共同整理,鲁为民博士先后获得了北京清华大学学士和美国加州理工学院博士学位,在包括IEEE Transactions等学术期刊和诸多国际会议上发表了超过50篇学术论文、取得了多项美国和中国发明专利,同时还斩获了吴文俊人工智能科学技术奖。目前我正在和鲁博士共同进行人工智能的研究。
资料内容涵盖了从入门到进阶的各类视频教程和实战项目,无论你是小白还是有些技术基础的,这份资料都绝对能帮助你提升薪资待遇,转行大模型岗位。


CSDN粉丝独家福利
这份完整版的 AI 大模型学习资料已经上传CSDN,朋友们如果需要可以扫描下方二维码&点击下方CSDN官方认证链接免费领取 【保证100%免费】
读者福利: 👉👉CSDN大礼包:《最新AI大模型学习资源包》免费分享 👈👈
更多推荐

 26
26 0
0- 0



 已为社区贡献46条内容
已为社区贡献46条内容

所有评论(0)