
Python + ESP32 DIY炫酷的物联网远程机械臂
机器人和人工智能是目前很热门的两个学科,未来也是被很看好的行业之一,而机械臂就是通往机器人和人工智能的基础。本机械臂是入门级的自由度金属机械手臂,主要包括舵机驱动板、金属机械手臂支架和四个金属齿轮舵机,同时结合HaaS开发框架,就可以通过远程控制......
来这里发现更多创意案例
HaaS开发框架HaaS积木方案,赋能生态开发者,让您快速找到自己需要的解决方案,硬件主板与外设,以及各种应用组件。https://haas.iot.aliyun.com/solution/
1、简介
1.1、背景
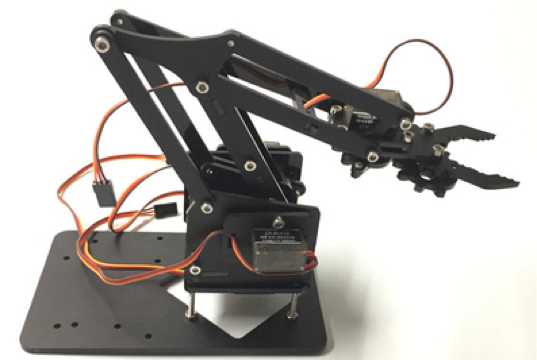
机器人和人工智能是目前很热门的两个学科,未来也是被很看好的行业之一,而机械臂就是通往机器人和人工智能的基础。本机械臂是入门级的自由度金属机械手臂,主要包括舵机驱动板、金属机械手臂支架和四个金属齿轮舵机,同时结合HaaS开发框架,就可以通过远程控制机械臂的一些基础动作啦。
本课程就手把手教开发者如何自制一台远程控制机械臂。
本课程的理念:希望开发者学习完本课程以后,可以模仿本案例,打造出属于自己的机械臂,知道其运作原理,然后通过不断挖掘,打造更加智能增加进阶的智能机器人。
1.2、准备
本案例打造需要如下硬件:
- NodeMCU-32S一台
- Servo舵机四个
- PCA9685多路PWM传感器一个
- 机械臂一套
- 杜邦线若干
- 外部6-12V直流电源
- Micro-USB数据线一条
硬件连线图如下图所示:
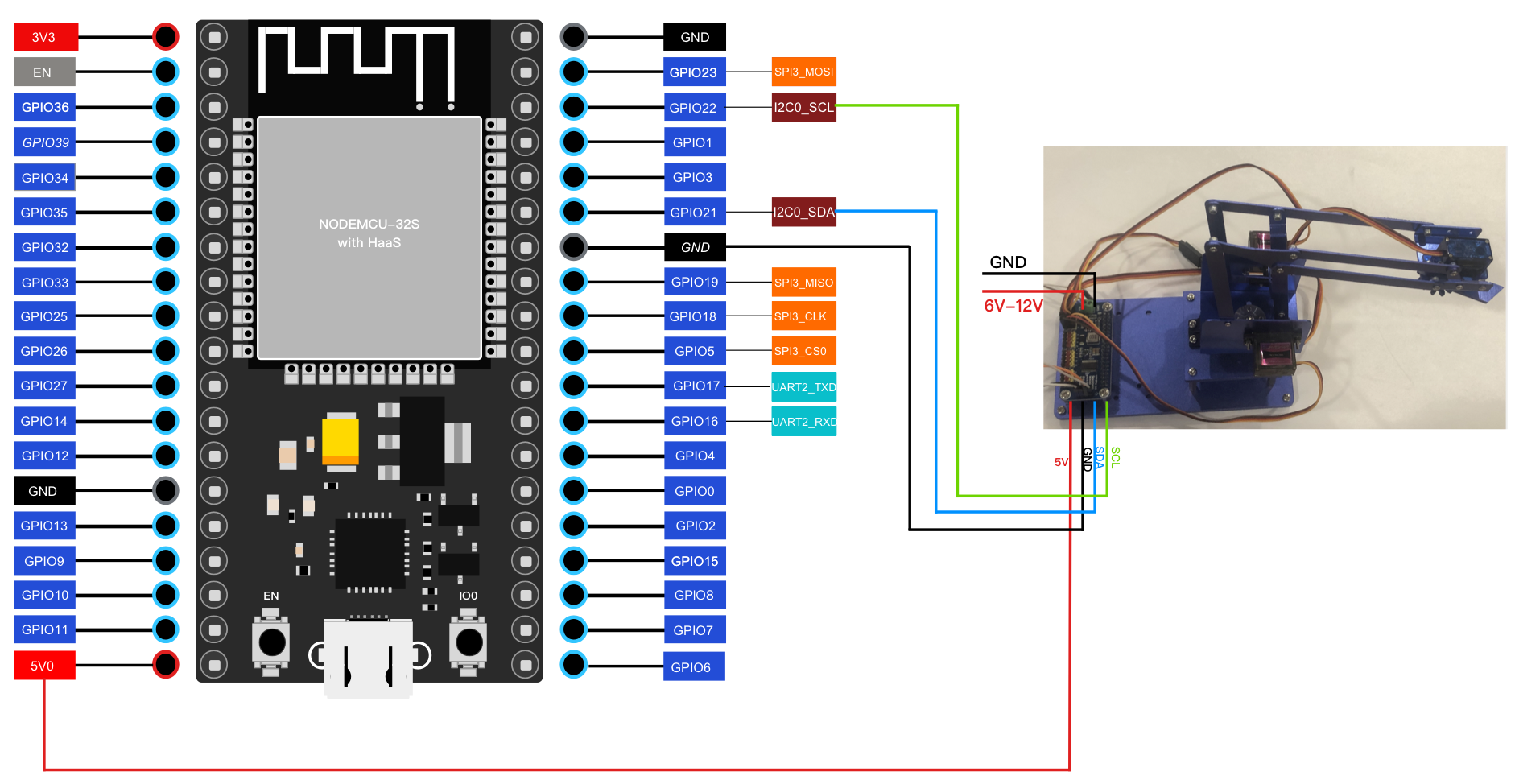
根据ESP32的硬件连线图,可以得知机械臂驱动板是PCA9685是I2C总线连接,另外机械臂驱动板需要一个6-12V直流电源单独供电。
2、物联网平台开发
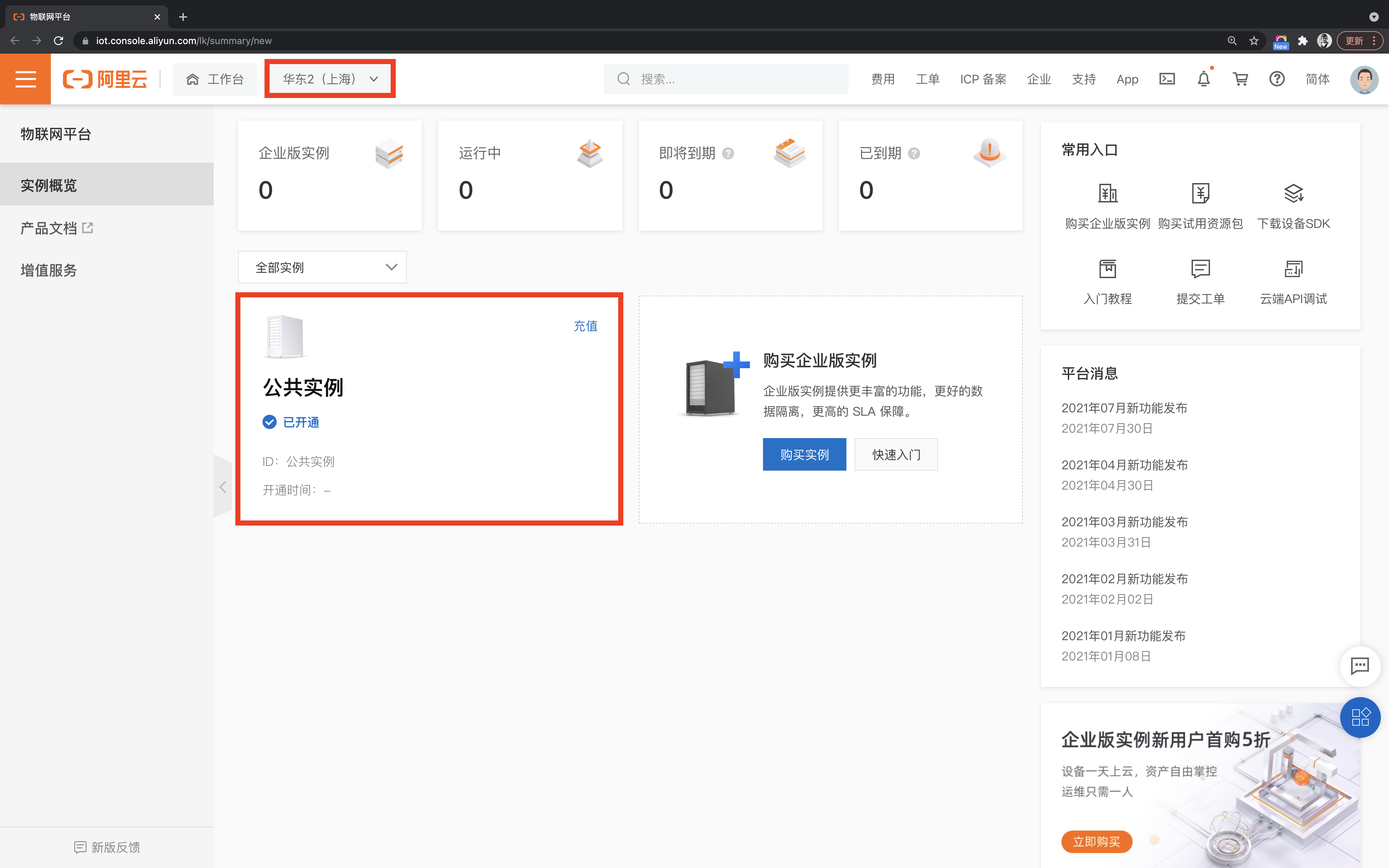
对于第一次使用物联网平台的读者,需要开通实例以使用物联网平台的功能。这里可以使用免费的公共实例进行开发。
在物联网平台中,左上角选择“华东2-上海”,点击“公共实例”,即可开通。
开通物联网平台功能之后,需要完成下面的3个步骤完成云端设备的设定:
- 创建云端产品
- 创建产品属性(物模型)
- 创建云端设备(获取三元组)
2.1、创建云端产品
点击上图中的“公共实例”,即可进入控制台进行产品创建。然后,点击创建产品按钮,如下图所示。

在新建产品设定页面按照下图所示,设定“产品名称”,选择所属的“自定义品类”(如果创建的产品品类为标准品类,可以选择标准品类),节点类型选择“直连设备”,联网方式选择“Wi-Fi”,数据格式选择“ICA标准数据格式”,检验类型和认证方式选择默认设定即可。还可以根据开发者自己的需求在“产品描述”页面添加针对此产品的描述。

选择之后,点击“确认”按钮,即可完成产品创建。返回“产品”页面之后可以看到产品类表中会出现刚刚创建的“机械臂”的产品,如下图所示。

2.2、创建产品属性(物模型)
点击上图中的“查看”按钮,即可看到产品信息,Topic列表,功能定义,数据解析等跟产品相关功能的设定。点开“功能定义”标签页,可以看到设备物模型定义,点击“添加自定义功能”,其中功能名称、标识符、数据类型和定义如下所示。

标识符是设备端上报设备属性状态的消息中需要使用的标识符,并且只有在设备上报的属性内容符合“数据定义”中的数据取值范围的时候才会被物联网平台记录,否则会被物联网平台认定为非法属性而过滤掉。
产品及其物模型创建完成后就可以创建这个产品的设备了。
2.3、创建云端设备(获取三元组)
在产品列表页面中,点击“管理设备”,就会进到设备管理页面。

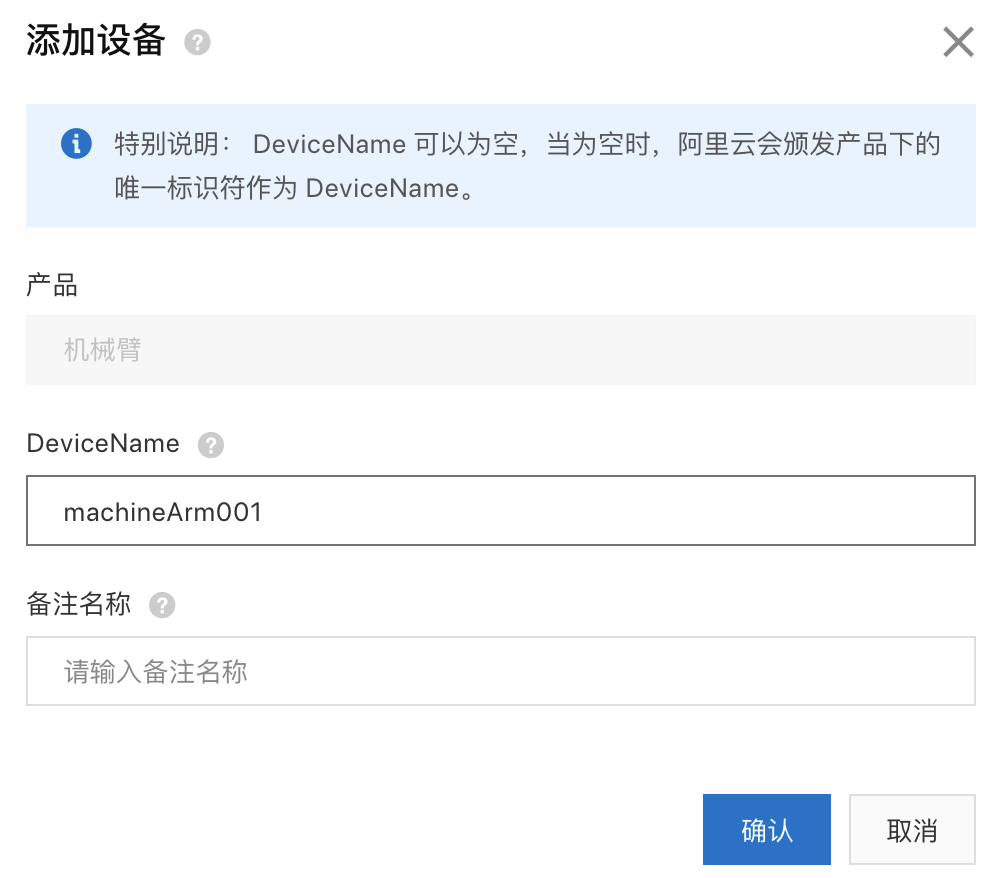
在“设备”页面点击“添加设备”按钮,如下图所示。

在“添加设备”页面中设定“deviceName”,这里开发者可以自己填入自己想设定的设备名称,也可以不填任何内容让系统自动生成设备名称,如下图所示。
设备添加完成后,点击“前往查看”按钮,就可以看到此设备端详细信息了。
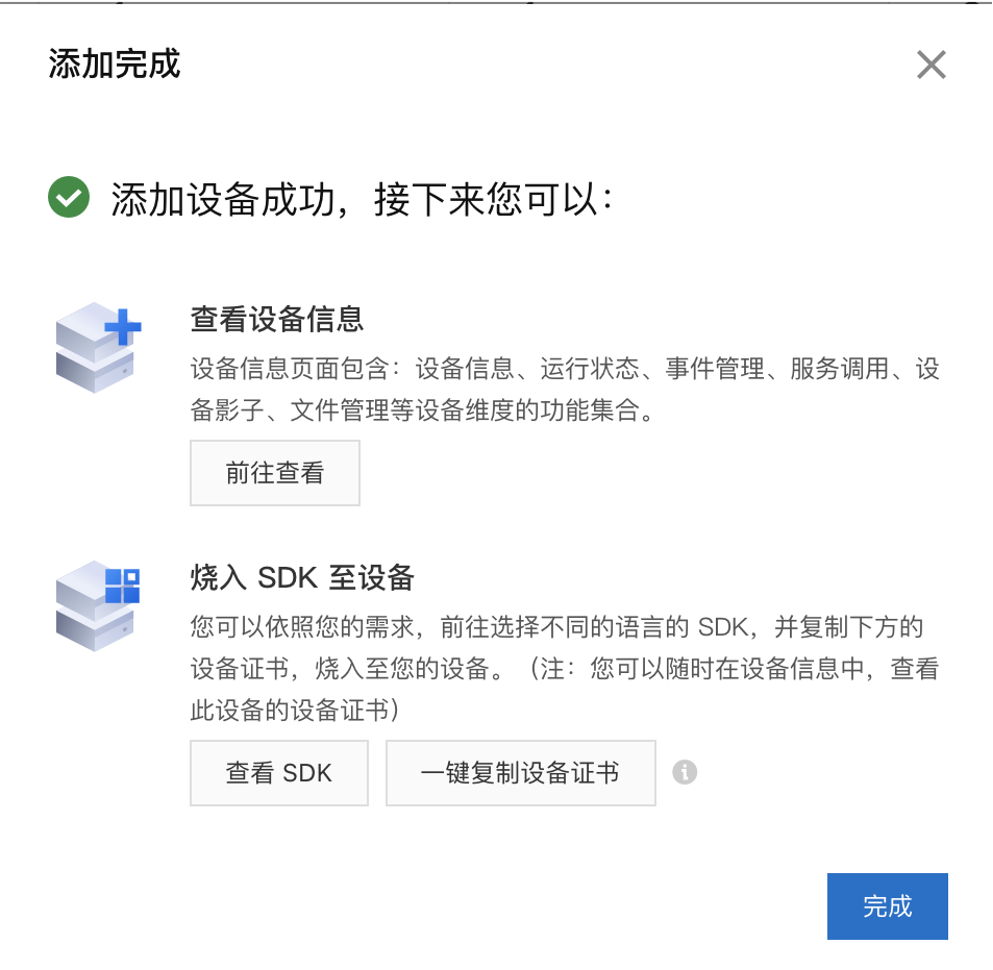
设备信息中有两个信息需要和设备端开发相匹配:
- 三元组
- 物模型属性信息

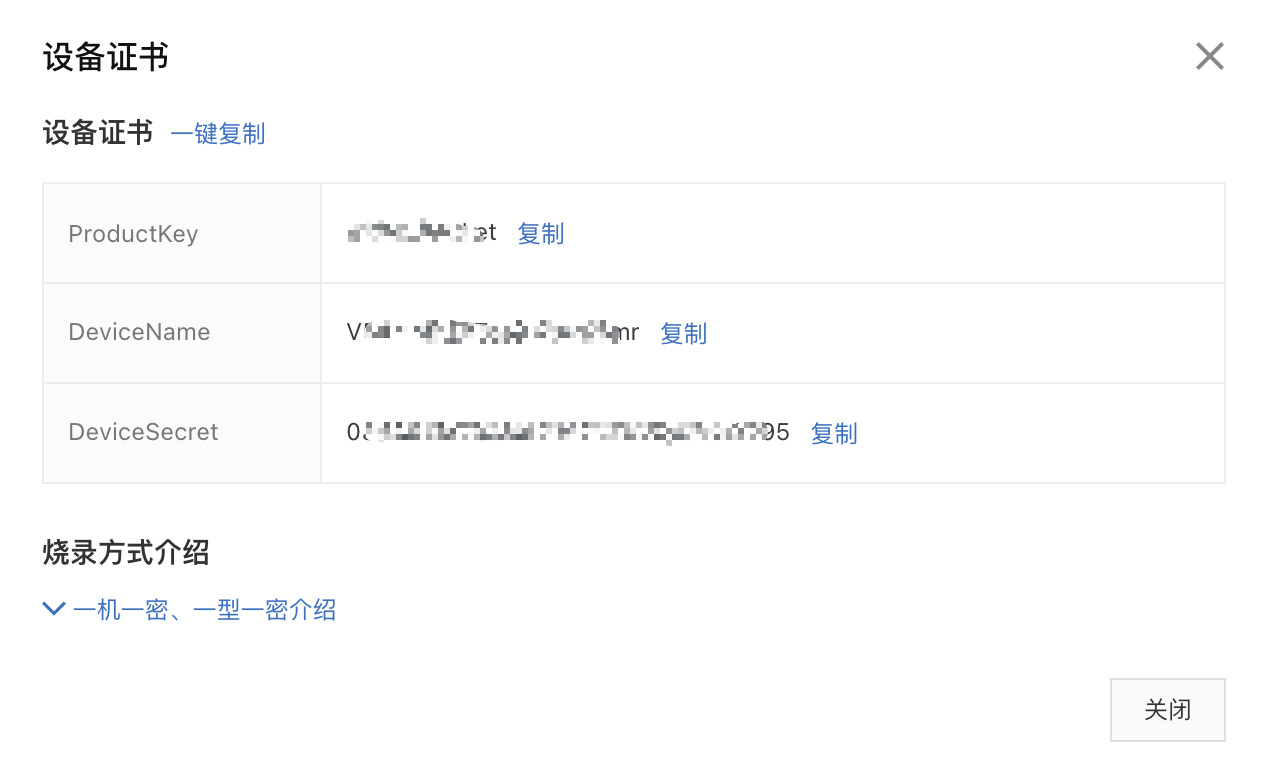
2.4.1、获取设备三元组
如上图所示,点击“查看”按钮,就可以看到设备的三元组信息,三元组是物联网设备端和物联网云端设备相关联的唯一标识符,在设备端连接云端的时候会使用三元组信息和云端进行鉴权,鉴权通过之后云端会认为设备已激活并上线。
2.4.2、查看设备属性信息
设备详情信息页中的“物模型数据”标签页中可以看到设备的所有属性信息、设备时间上报情况及设备服务调用情况,如下图所示。待物联网设备按照设备属性对应的标识符上报设备属性的时候,本图片中的“机械臂控制“等属性值就会显示设备最新的属性信息。

创建产品和设备的过程是按照面向对象的思想进行设计的,其中创建产品可以看成是新建一个类,其中的物模型则是类的对象,创建设备则是进行类的实例化。
3、设备端开发
3.1、开发环境
在进行下一步之前请确保ESP32开发环境已经搭建完毕。详情请参考esp32开发环境的说明。
3.2、创建解决方案
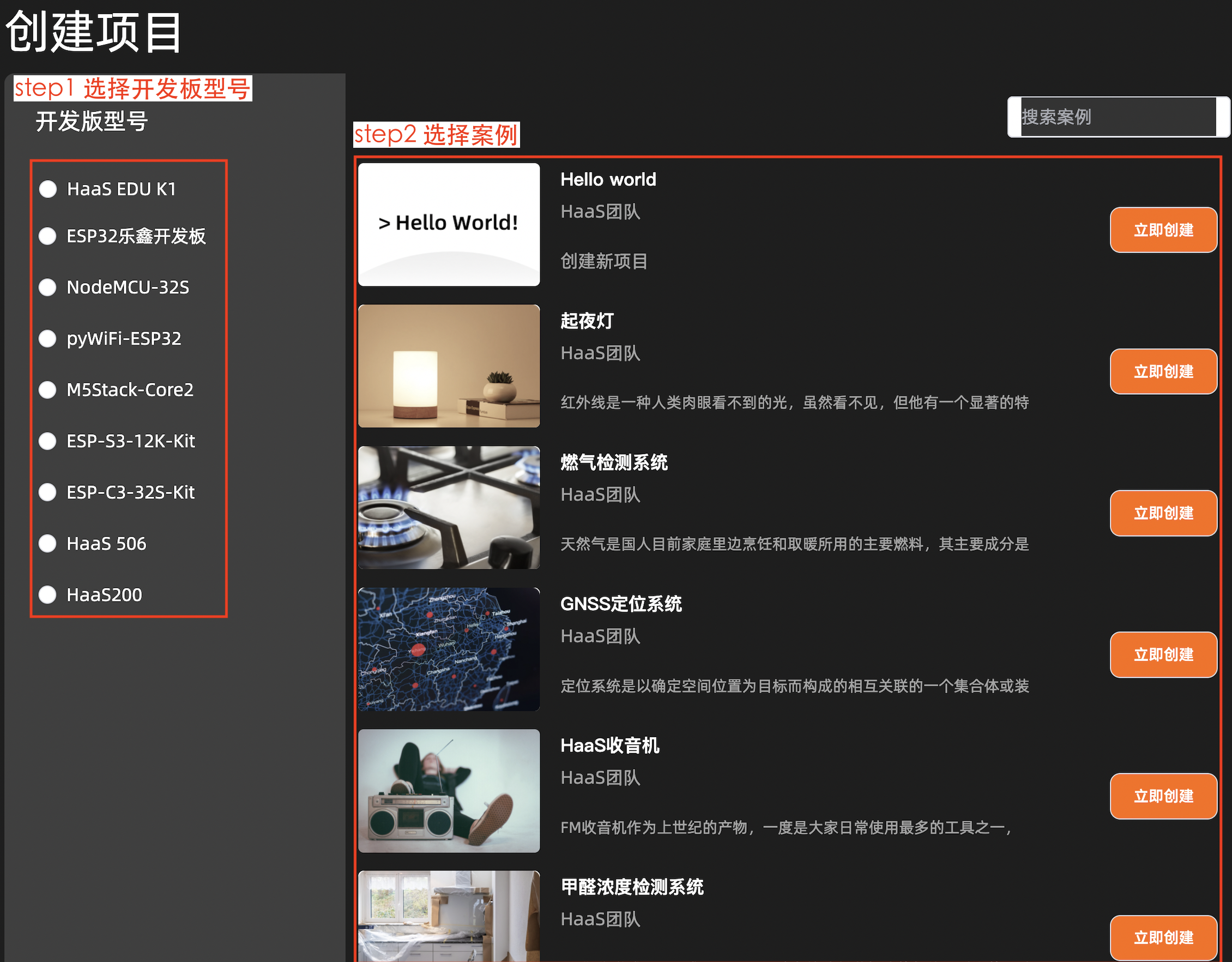
如下图所示,在Haas Studio中创建项目。先选择左侧的“开发板型号”再从右侧的案例中选择“远程控制机械臂”案例点击“立即创建”即可。
下面是重点代码段落讲解:
- PCA9685初始化以及控制
def pca9685_init():
global robotDev
i2cObj = I2C()
i2cObj.open("pca9685")
robotDev=pca9685.PCA9685(i2cObj)
print('pca9865 inited')
def left_ctrl():
robotDev.setServo(0,-pi/2)
def right_ctrl():
robotDev.setServo(0,pi/2)
def front_ctrl():
robotDev.setServo(1,-pi/2)
def back_ctrl():
robotDev.setServo(1,pi/2)
def catch_ctrl():
robotDev.setServo(3,-pi/2)
def uncatch_ctrl():
robotDev.setServo(3,0)
- 云端控制机械臂
# 设置props 事件接收函数(当云平台向设备下发属性时)
def on_props(request):
payload = ujson.loads(request['params'])
# print (payload)
# 获取dict状态字段 注意要验证键存在 否则会抛出异常
if "operate_machine" in payload.keys():
value = payload["operate_machine"]
if value == 1:
left_ctrl()
print("左移")
elif value == 2:
right_ctrl()
print("右移")
elif value == 3:
front_ctrl()
print("前移")
elif value == 4:
back_ctrl()
print("后移")
elif value == 5:
catch_ctrl()
print("夹住")
elif value == 6:
uncatch_ctrl()
print("放开")
else:
print("No operate")
4、运行结果
4.1、设备端运行效果
推送此脚本到ESP32之后,运行此脚本,ESP32串口会周期性的打印如下日志。其中:
- pca9865 inited!”说明pca9865初始化完毕
- “start”说明加湿器模块打开
- “stop”说明加湿器模块关闭
mount fs
==== python execute bootpy ====
enable OneMinuteOnCloud
==== python file check /data/pyamp/main.py ====
==== python execute from /data/pyamp/main.py ====
ssd1306 inited!
左移
后移
右移
前移
左移
4.2、物联网平台端设备信息查看
物联网设备的系统启动成功并连接到物联网平台之后,物联网平台上对应的设备状态会从”未激活状态“变为”上线“,在物模型数据标签页上会显示设备上报到物联网平台的属性值。


5、物联网应用开发
本案例通过物联网应用平台的界面控制机械臂的相关操作,开发者可以更加直观的对其操作。
5.1、中控大屏目标
本节课程主要目标是设计一个总控大屏的web应用,能实时的设置机械臂的相关操作
5.2、茶花生长环境监控系统
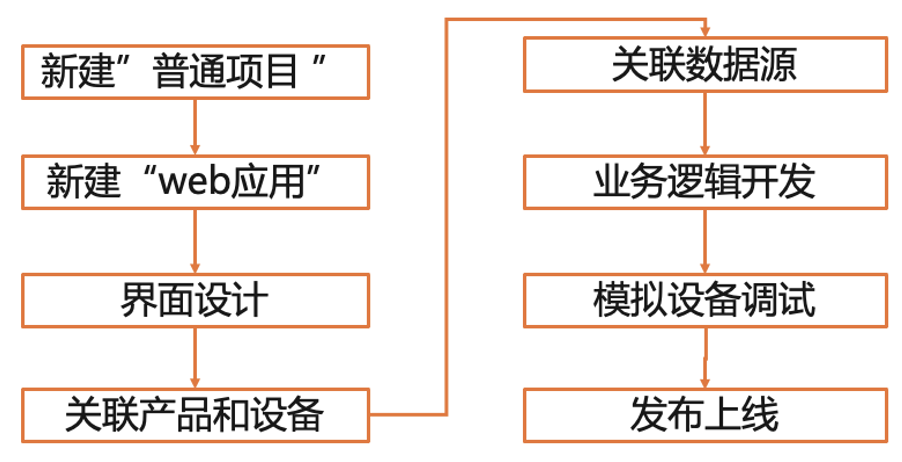
下图是一个典型的物联网应用程序开发的流程图,接下来本节就按照这个流程介绍如何花卉养植系统中控大屏的web应用程序的开发。
5.2.1、新建“普通项目”
打开IoT Studio官网,在项目管理中创建一个空白项目,如下图所示,将此项目命名为“控制机械臂”。
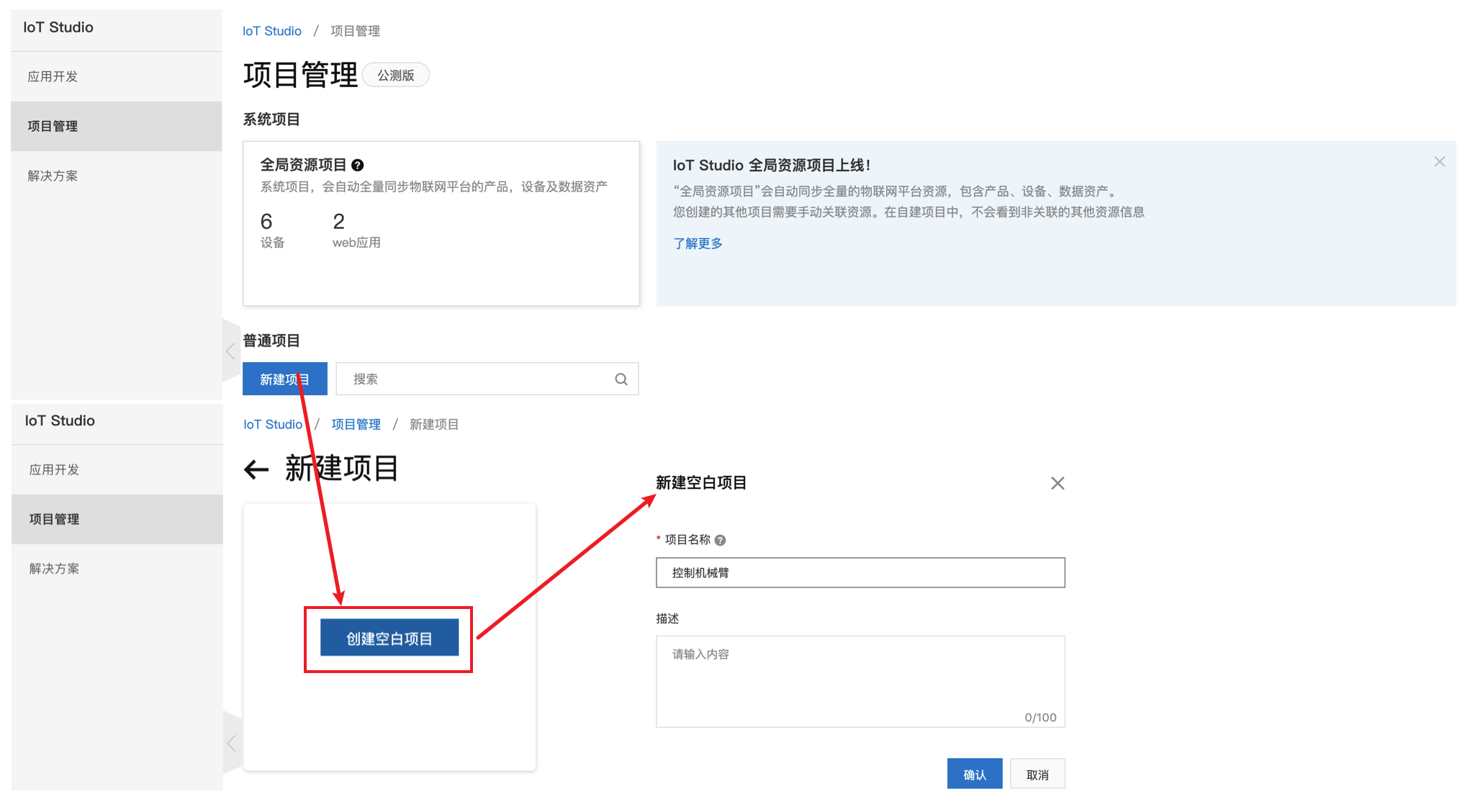
5.2.2、新建“Web应用”
新建“普通项目”之后,在新项目的首页新建一个Web应用,命名为“机械臂实时控制”。
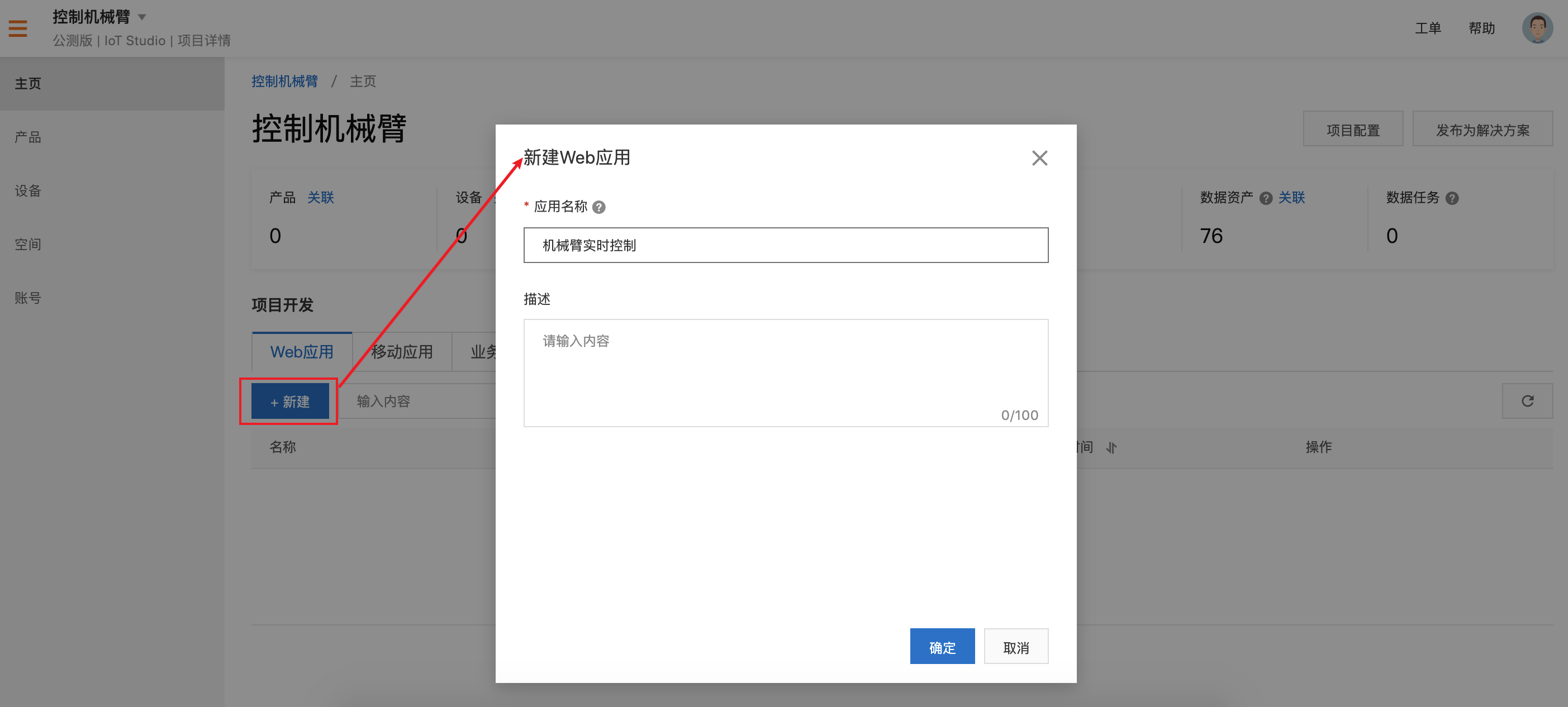
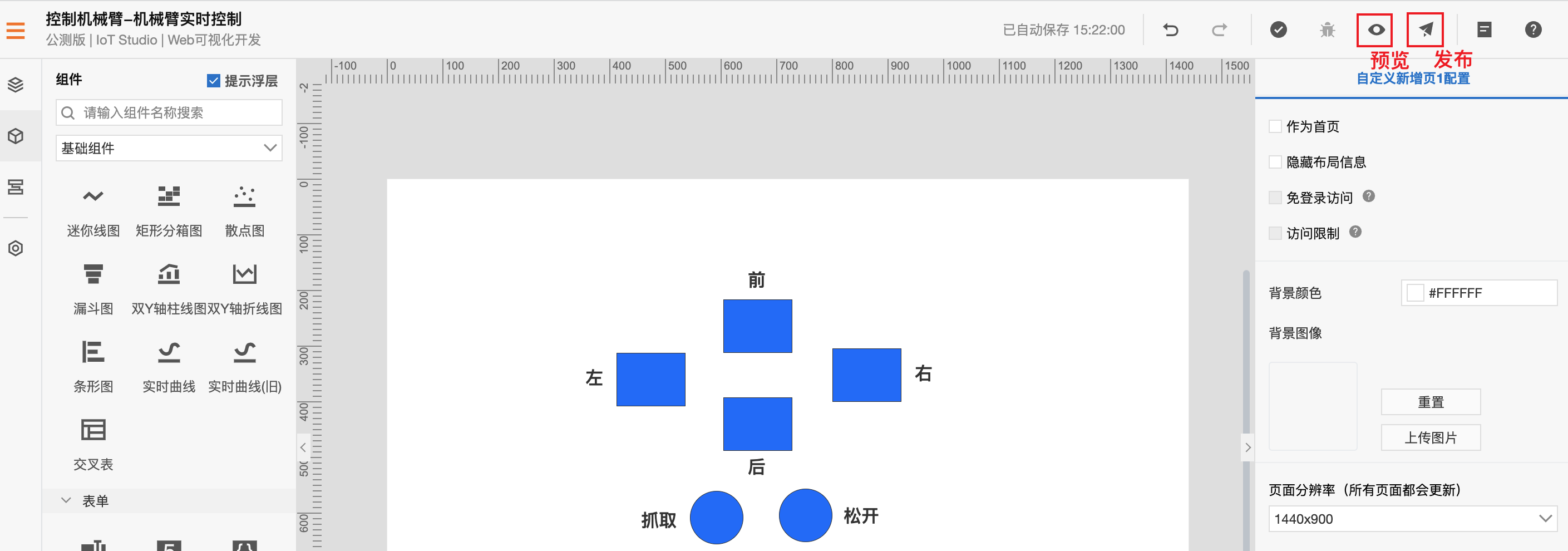
Web应用创建成功后会进入到应用界面设计页面。
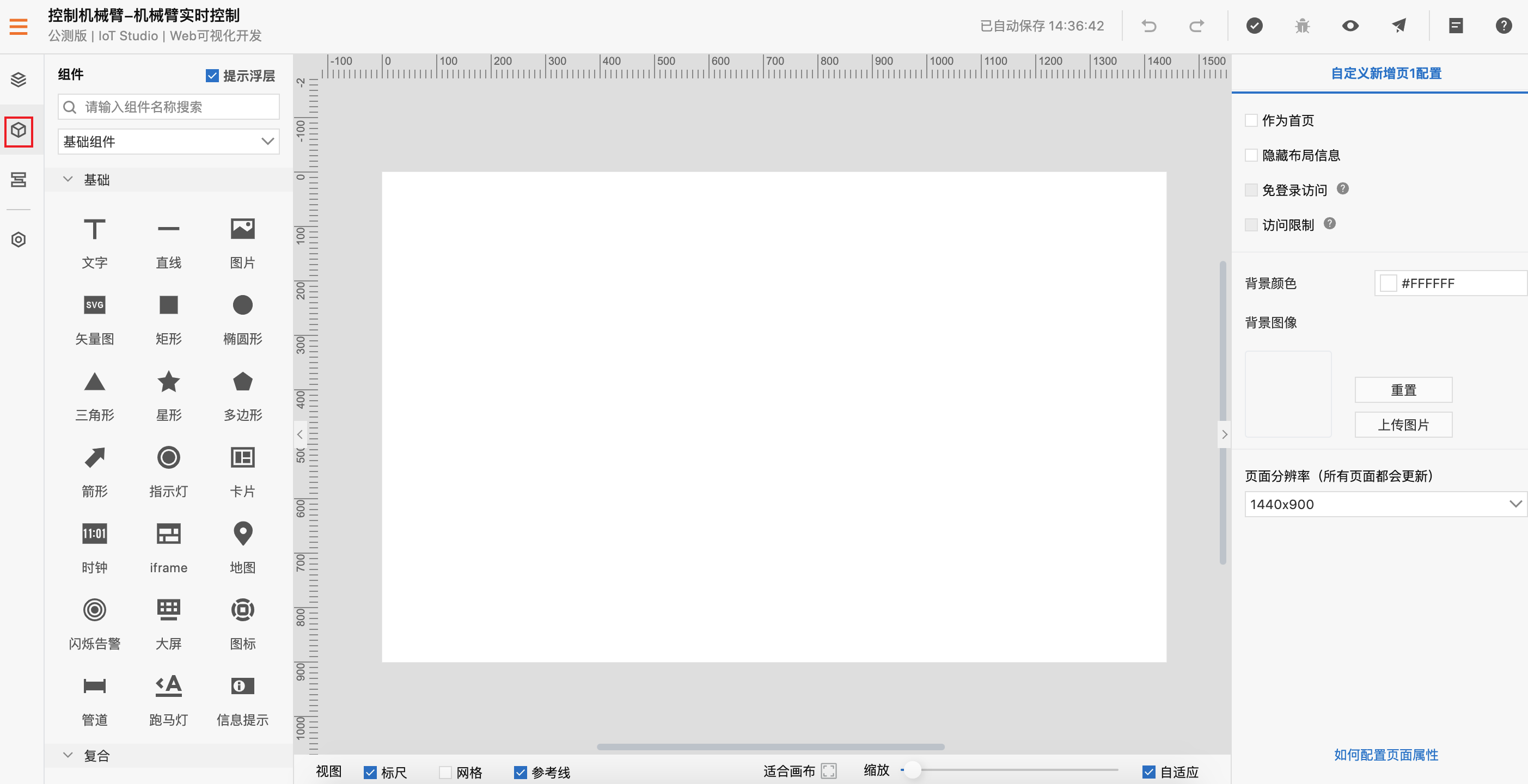
点击上图红框中的“组件”按钮图标,就可以看到可用的组件列表。各组件的说明请参考IoT Studio组件说明。
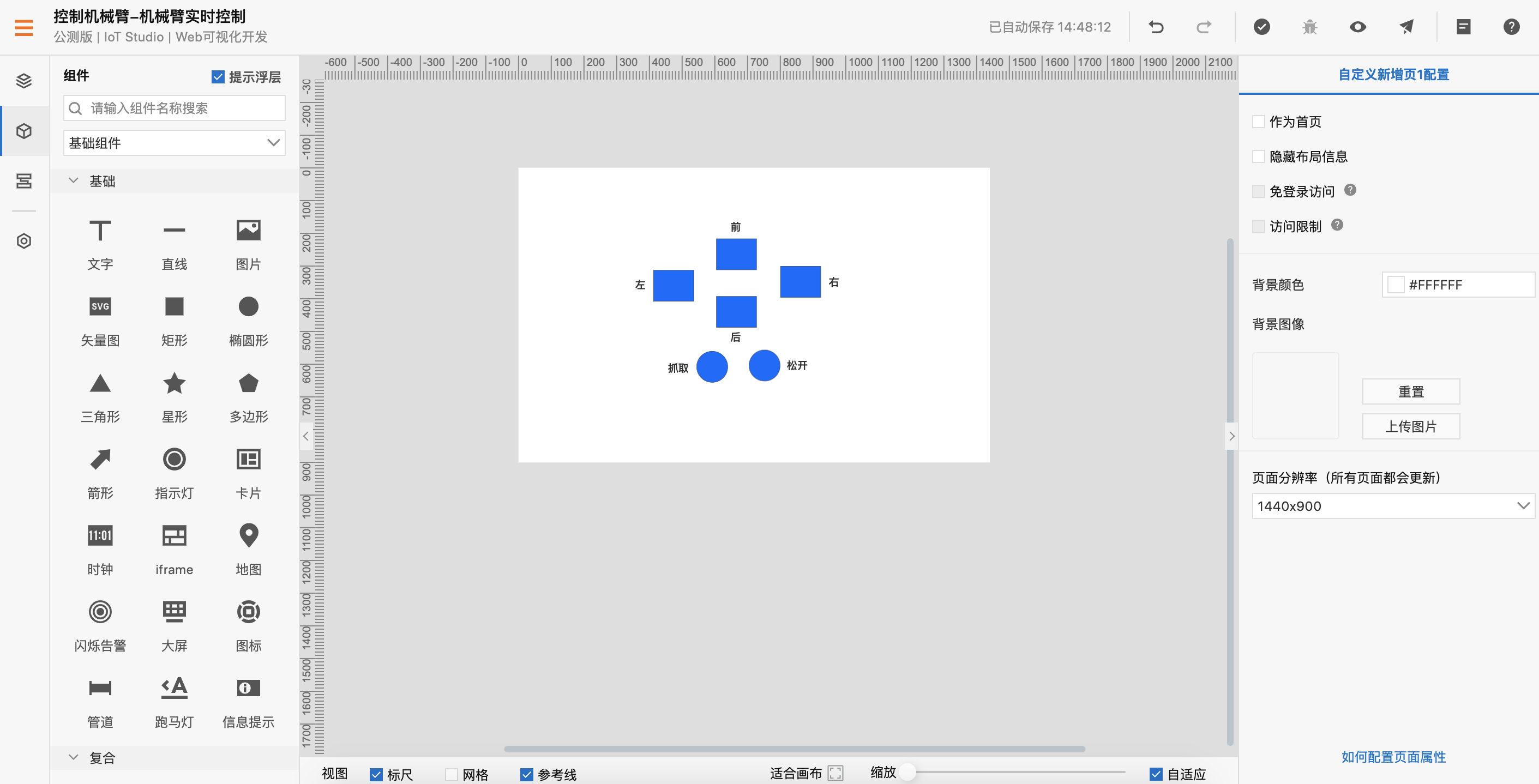
5.2.3、页面设计
这里我们用到2种组件:
- 矩形
用于控制机械臂的前后左右 - 椭圆形
用于控制机械臂的抓取和松开
将两种组件拖到中间的画布区,适当调整组件布局,如下图所示。
5.2.4、关联产品和设备
此时回到”控制机械臂“项目的主页,对产品和设备进行关联,如下图所示:

关联产品的过程如下:

关联设备的过程如下:

产品和设备关联完毕之后,就可以将把组件和设备的属性关联起来了。
5.2.5、关联数据源
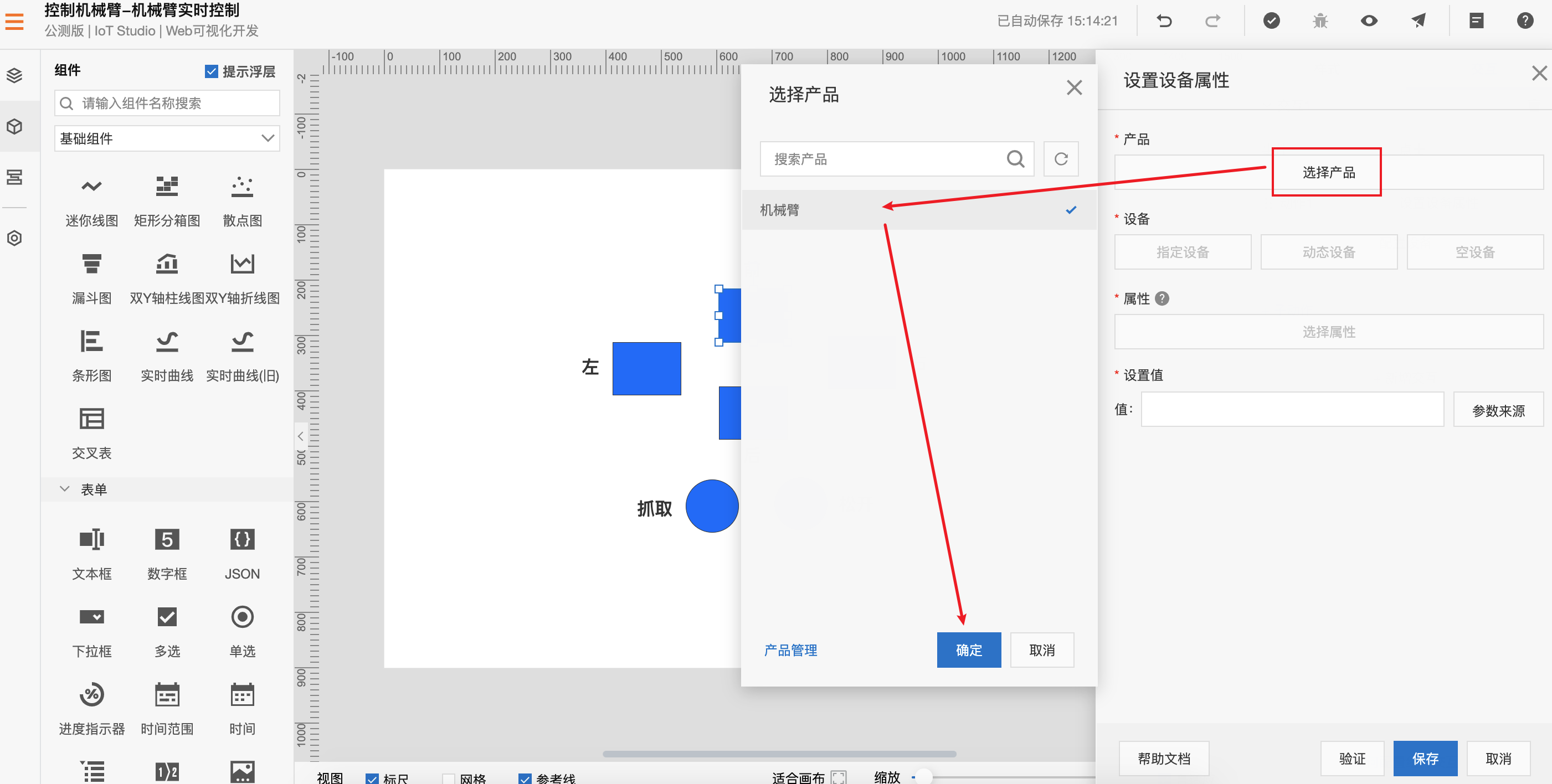
关联数据源分为如下3个步骤,每个步骤的截图如下:
- 关联产品
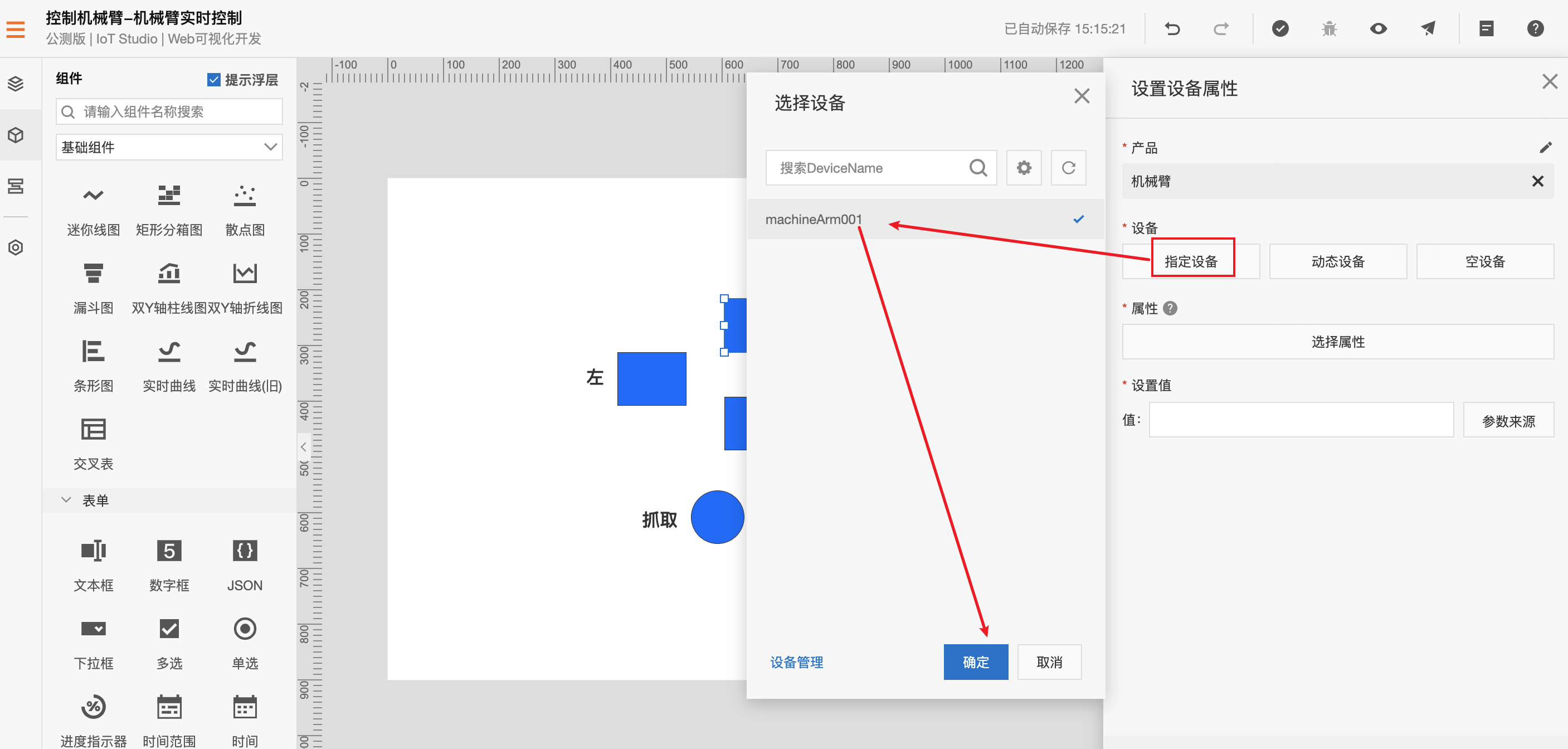
- 关联设备
- 关联属性
具体操作步骤如下:
- 选中”向前“控制组件,点击右侧的“配置数据源”。
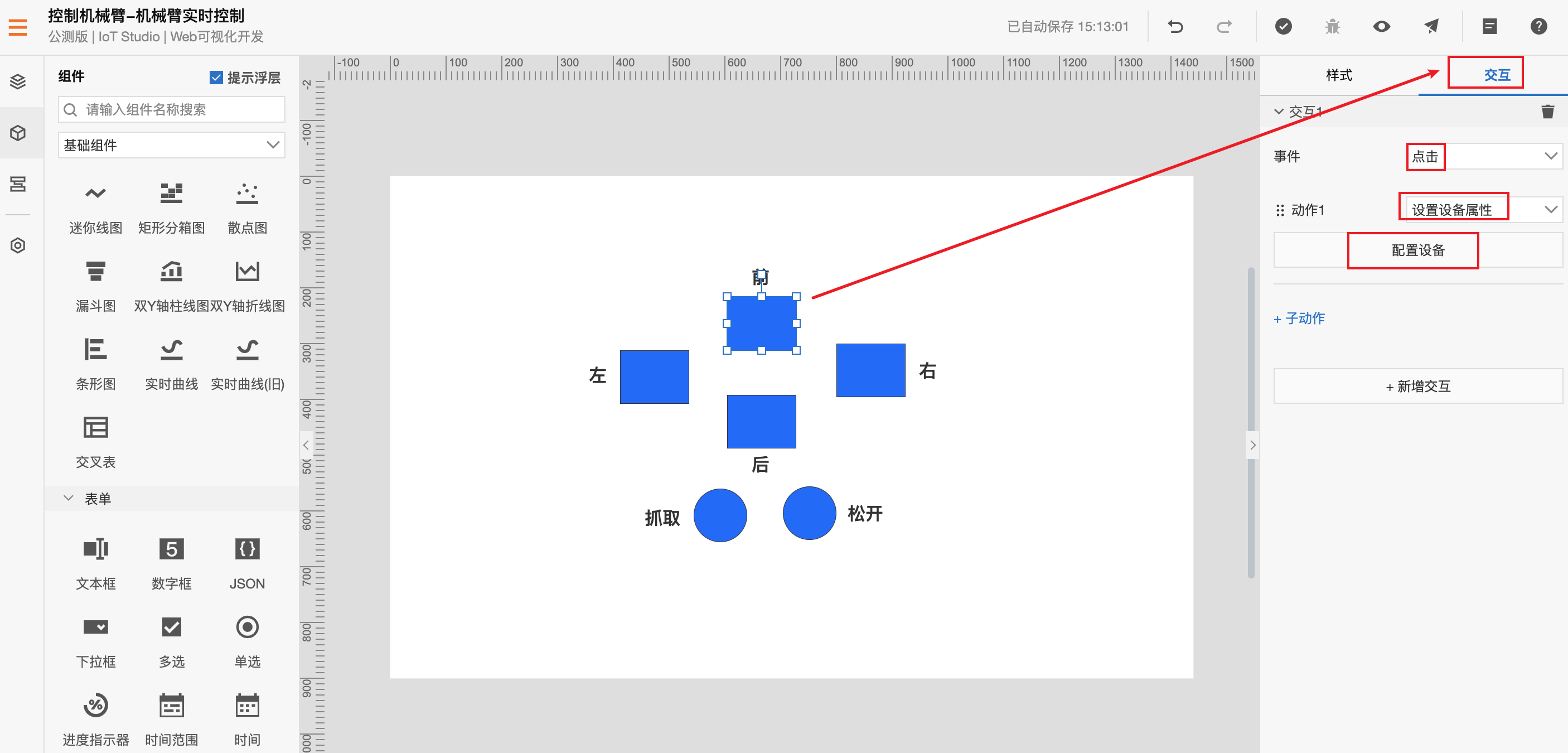
- 选择目标产品
- 选择目标设备
- 选择“向前“控制属性
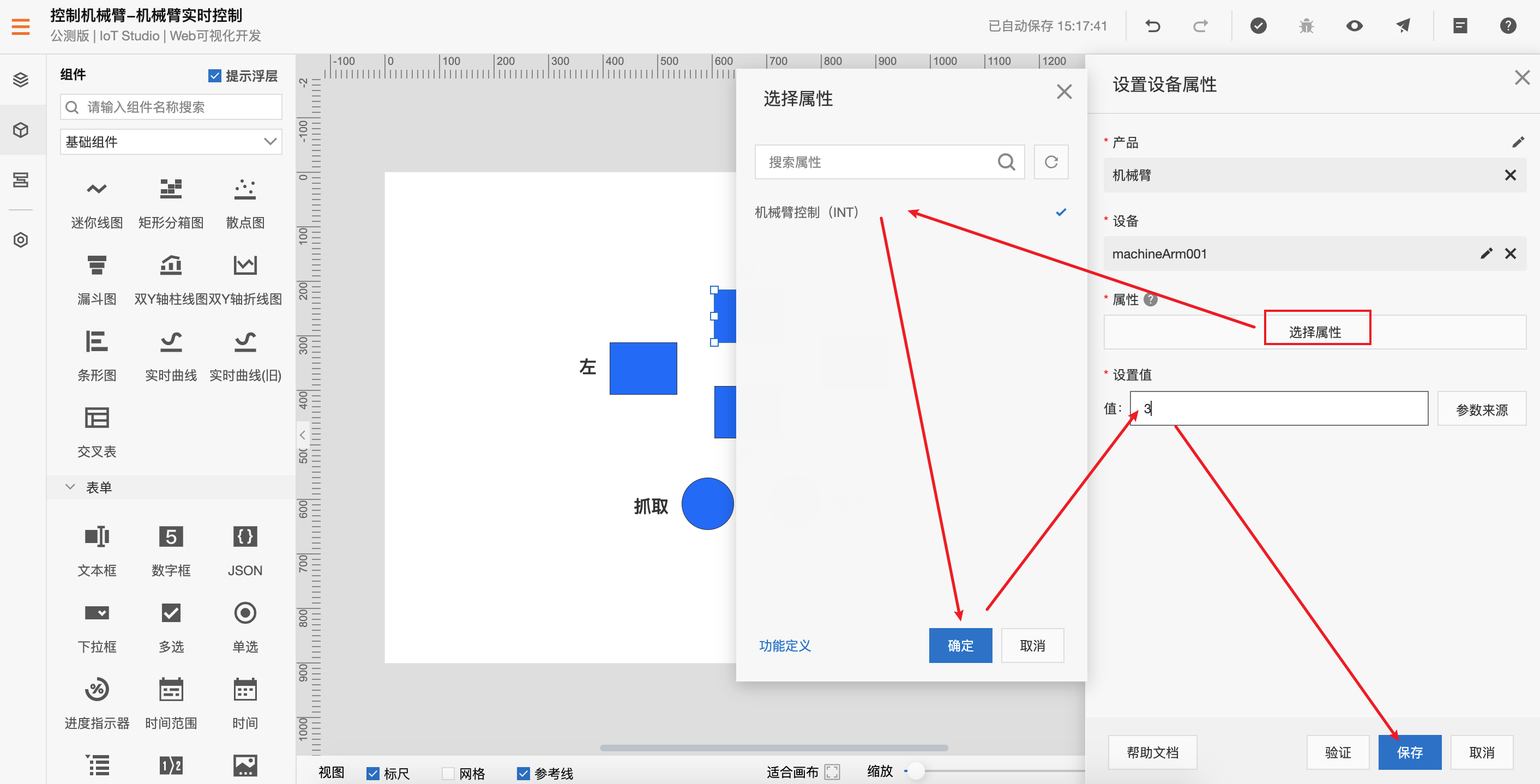
其他的“向后”、“向左”、“向右”、“抓取”、“松开”与向前的配置一致,只需要修改相应的目标值。
- 向后:4
- 向左:1
- 向右:2
- 抓取:5
- 松开:6
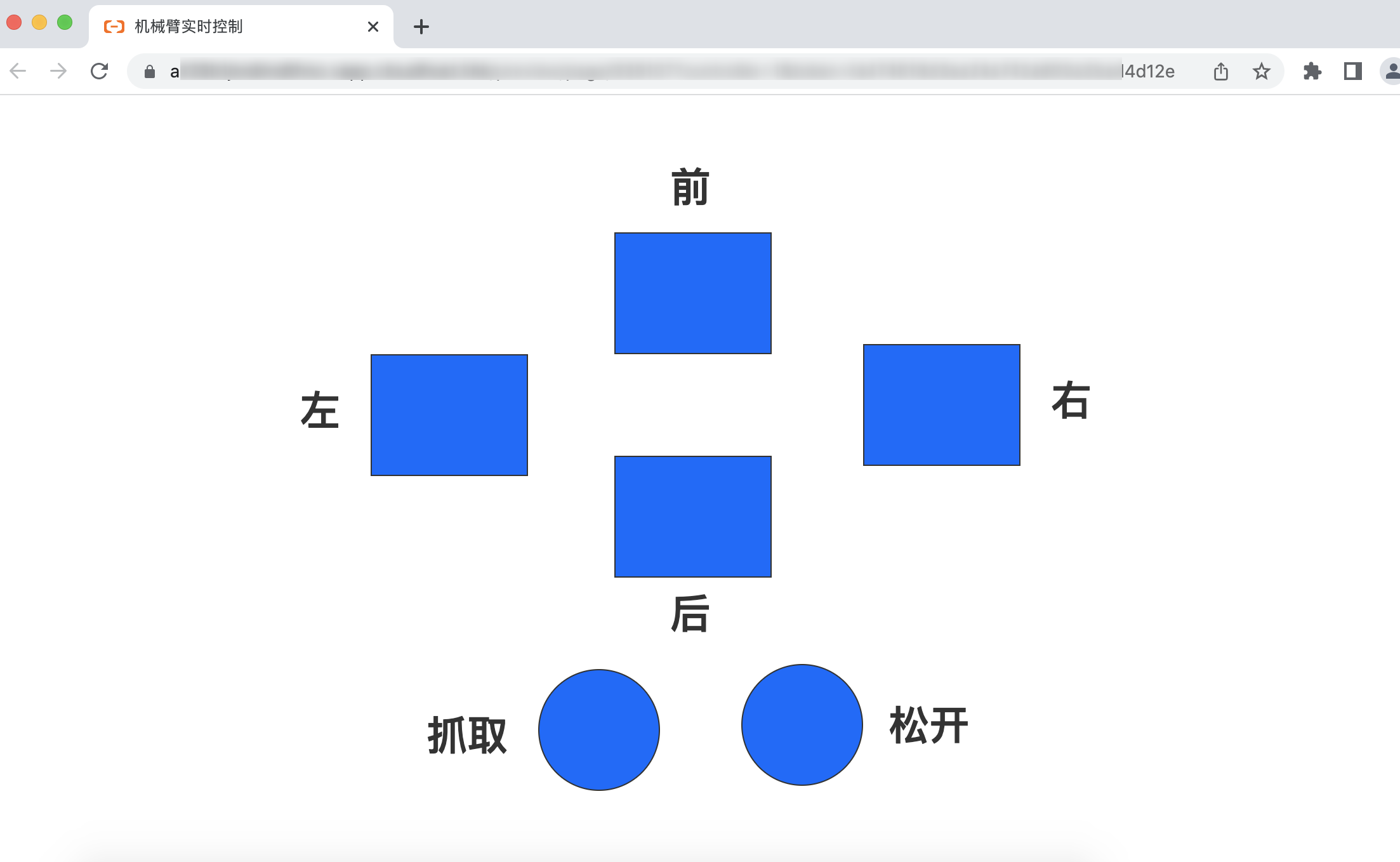
5.2.6、发布上线
在发布之前可以点击上图的“预览”查看应用的实际运行效果。实际运行效果如下图所示:
思考:本案例只设计远程控制机械臂的前后左右抓取放松等操作,开发者可以以此为基础,可以增加颜色识别传感器,这样可以通过颜色识别,抓取不同的物体,进一步让机械臂实现自动化能力,欢迎留言交流~
更多推荐
 1
1 0
0- 0



 已为社区贡献14条内容
已为社区贡献14条内容

所有评论(0)