
写文章




- @zhaoliang38
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
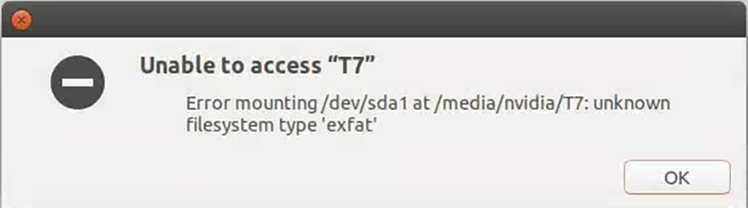
AGX硬盘无法识别:error mounting /dev/sda1 at /media/nvidia/T7:unknow filesystem type ‘exfat‘
AGX硬盘无法识别:error mounting /dev/sda1 at /media/nvidia/T7:unknow filesystem type 'exfat'
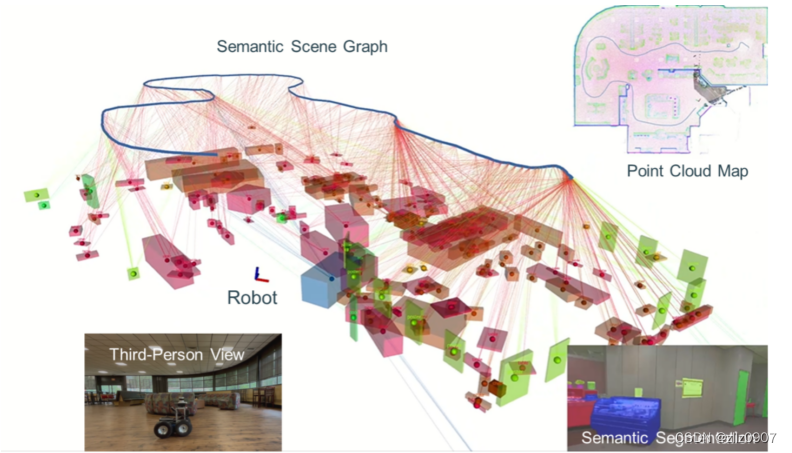
SayNav: 利用大语言模型在未知环境中导航
SayNav 是一种新颖的规划框架,它利用来自大型语言模型 (LLM) 的人类知识,为自主agent动态生成分步指令,以在未知的大规模环境中执行复杂的导航任务。它还能够有效地泛化学习,以从模拟导航到真实的新环境。
ROS下优秀的机器人开发框架
ROS下优秀的机器人开发框架

SayNav: 利用大语言模型在未知环境中导航
SayNav 是一种新颖的规划框架,它利用来自大型语言模型 (LLM) 的人类知识,为自主agent动态生成分步指令,以在未知的大规模环境中执行复杂的导航任务。它还能够有效地泛化学习,以从模拟导航到真实的新环境。
KF、EKF、UKF、ESKF、PF对比
KF、EKF、UKF、ESKF、PF对比,ESKF介绍
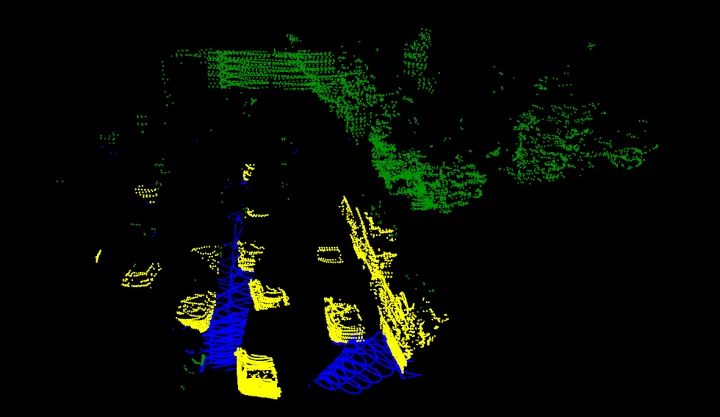
SLAM中的动态物体去除问题
SLAM中的动态物体去除问题
ICP、PL-ICP、PP-ICP、GICP、CT-ICP对比
ICP、PL-ICP、PP-ICP、GICP、CT-ICP原理介绍及对比
docker: Error response from daemon: No command specified
docker: Error response from daemon: No command specified
到底了