- @zUlKyyRC
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
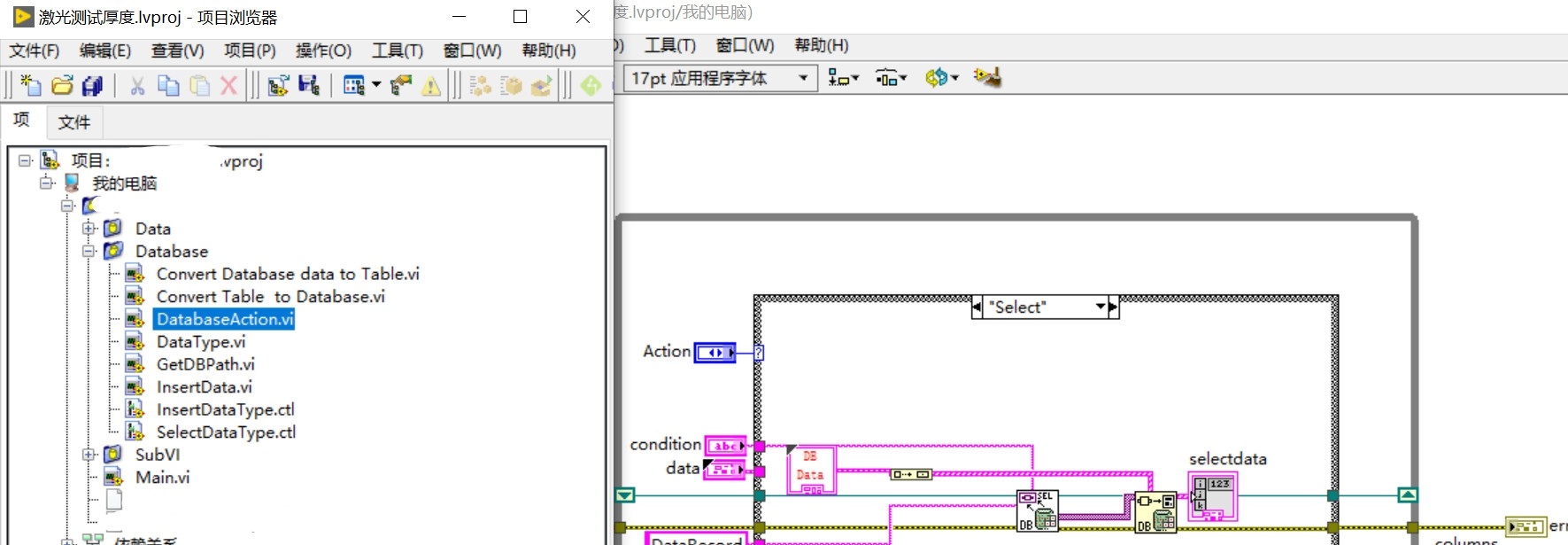
LabVIEW数据库Mysql数据库操作;增加-删除-更新-查询;数据管理程序,完整案例,可移植。在数据驱动的时代,数据库操作是众多应用不可或缺的一环。LabVIEW 作为一款功能强大的图形化编程环境,与 MySQL 这个广泛使用的开源数据库相结合,能打造出高效的数据管理程序。今天咱就来详细唠唠在 LabVIEW 里对 MySQL 数据库进行增加、删除、更新和查询操作的完整案例,而且这案例是可移植
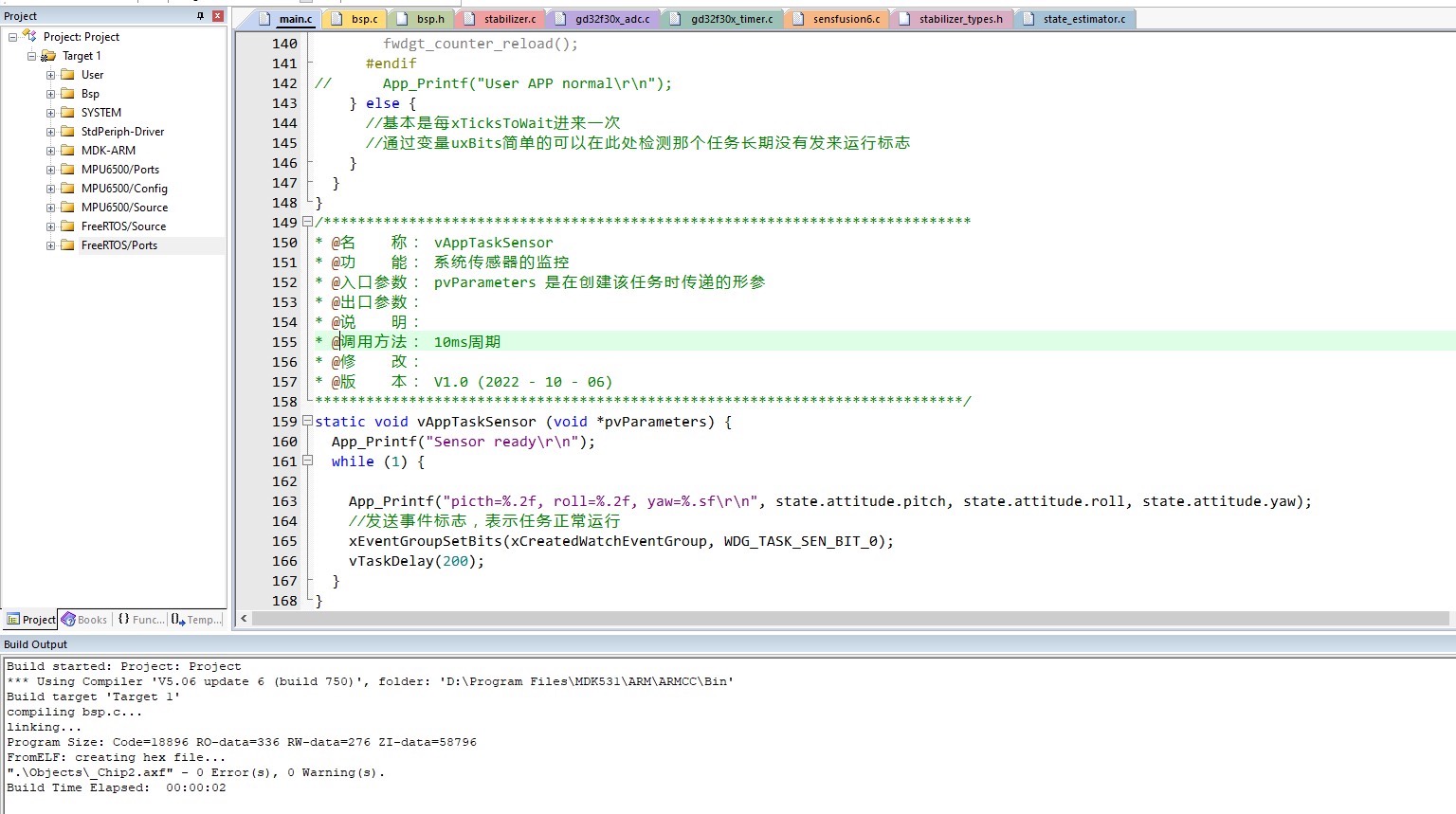
这玩意儿说起来简单,真要自己动手从零搞起,没点耐心还真不行。先说硬件配置,MPU6050和MPU6500这俩兄弟用起来差不多,都是I2C接口,注意电源要稳,最好单独供电别跟数字电路混用。FreeRTOS任务拆分有讲究,建议分两个任务:一个高频任务专门读传感器数据(500Hz以上),另一个中频任务做解算(200Hz左右)。这里有个细节要注意,GD32的I2C时序和STM32略有不同,如果发现通信失败
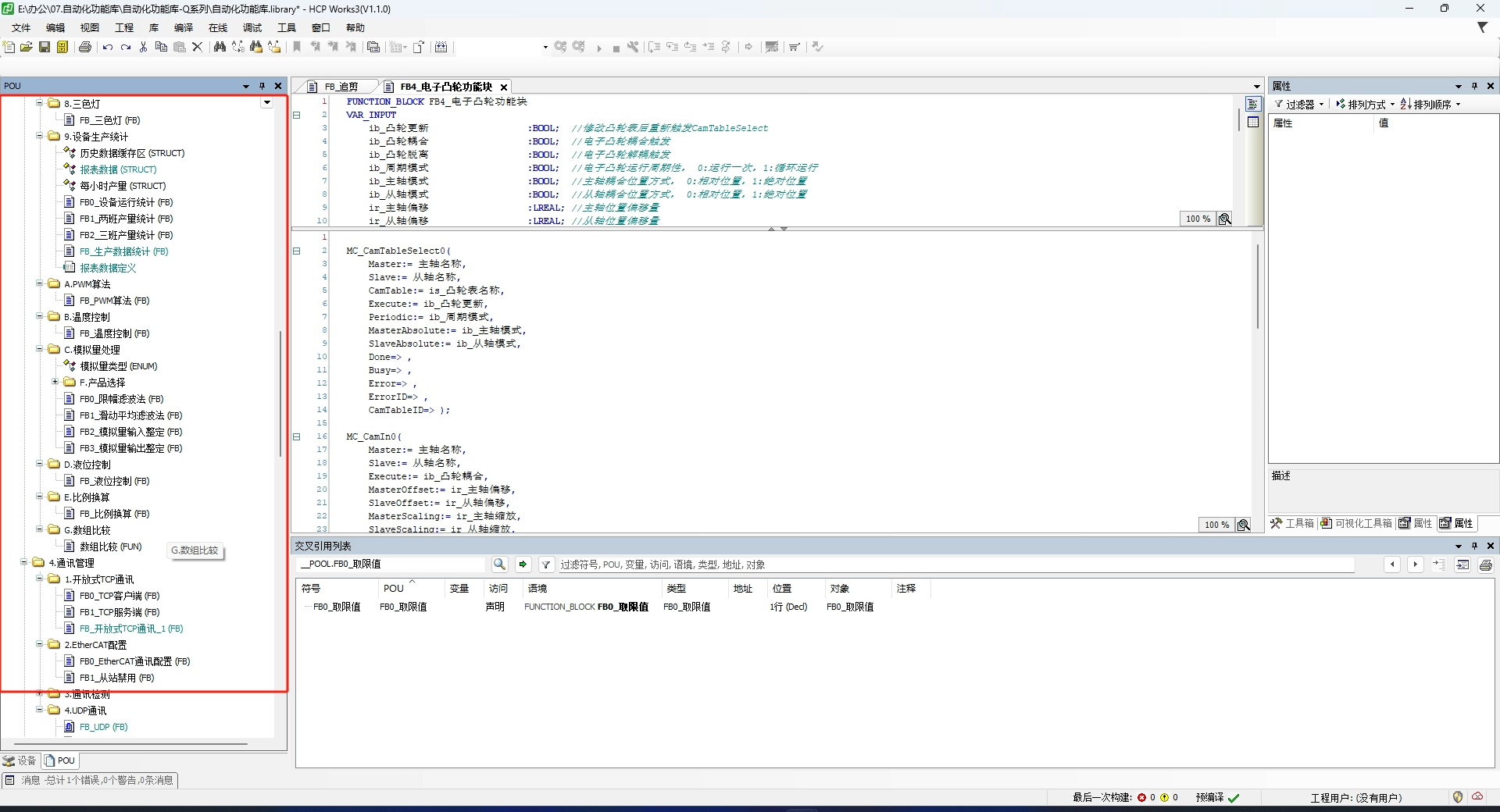
最近有个做包装机的哥们,直接把我们的状态机模板和第三方视觉库对接,三天就搞定了以前要两周的开发任务。工业自动化这行干久了,总有几个让人头秃的瞬间:每次项目都要重新造轮子,设备联调时发现程序结构千奇百怪,新同事接手代码就像在破译外星密码...直到去年我们团队把CODESYS开发框架彻底重构,现在终于能笑着写PLC程序了。最骚的是存储指针可以指向SD卡、数据库甚至云平台,想存哪就存哪,比瑞士军刀还灵活
labview操作access和sql server数据库很实用的例子,含有创建表格,读写数据,按时间段读取,读取表格名称,还有部分sql指令操作等提供数据库软件,提供远程安装等在开发项目时,经常需要与数据库打交道,LabVIEW 作为一款功能强大的开发工具,提供了与 Access 和 SQL Server 数据库交互的便捷方式。今天就来分享几个超实用的例子。
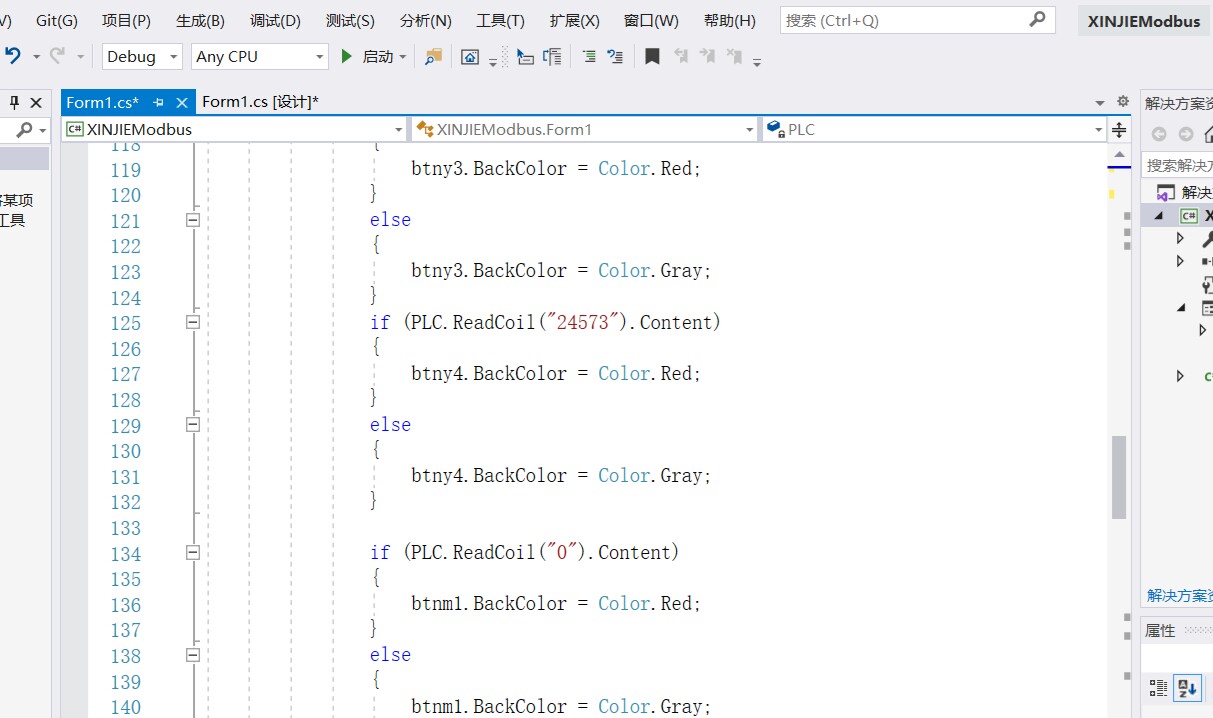
通过本文,我们使用C#语言和Modbus.Net库,实现了与信捷PLC的ModbusTCP通信。从连接建立到数据读取,再到异常处理,整个过程都进行了详细的讲解和代码实现。ModbusTCP通信是一项非常实用的技能,掌握了它,你就可以轻松地构建自己的自动化监控系统了。无论是读取传感器数据,还是控制生产设备,ModbusTCP都能为你提供可靠的支持。希望这篇文章能帮助你快速上手ModbusTCP通信开
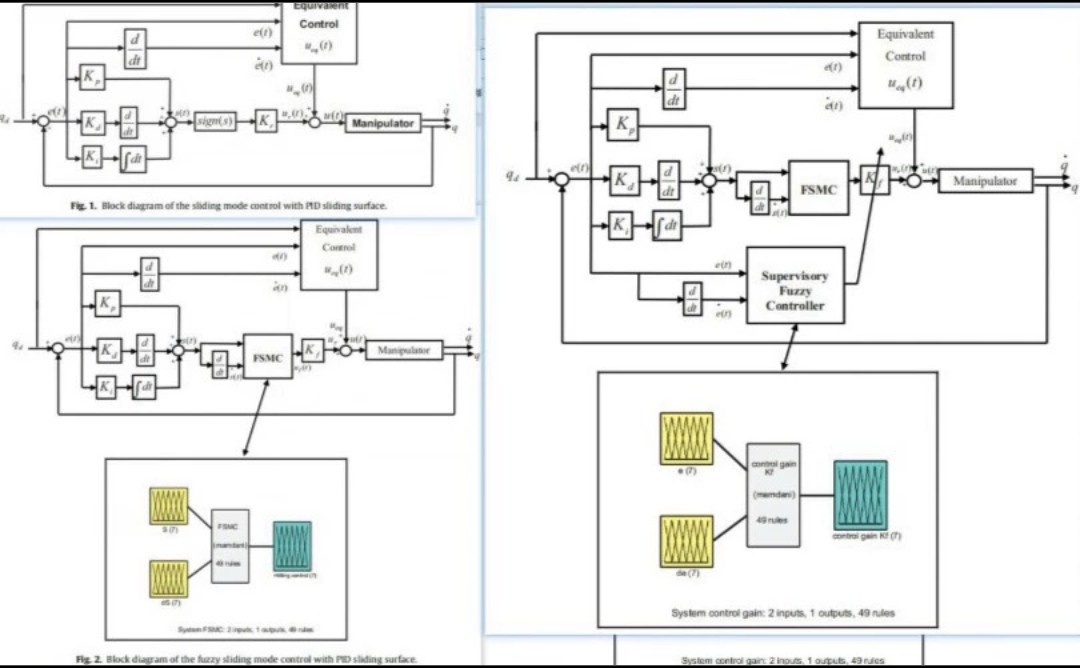
代码层面上看,PID的实现量不到20行,滑模大概30行,而模糊滑模加上模糊规则库后飙到80行。但要说抗干扰能力,在给机械臂突然加上5kg负载时,PID的跟踪误差直接破10度,滑模维持在2度左右但抖得厉害,模糊滑模则把误差压在1.5度还没明显抖动。MATLAB机械臂自适应模糊滑模控制代码,机器人滑膜控制,自适应控制,模糊控制,4自由度机械臂,附带多种控制方法对比。MATLAB机械臂自适应模糊滑模控制
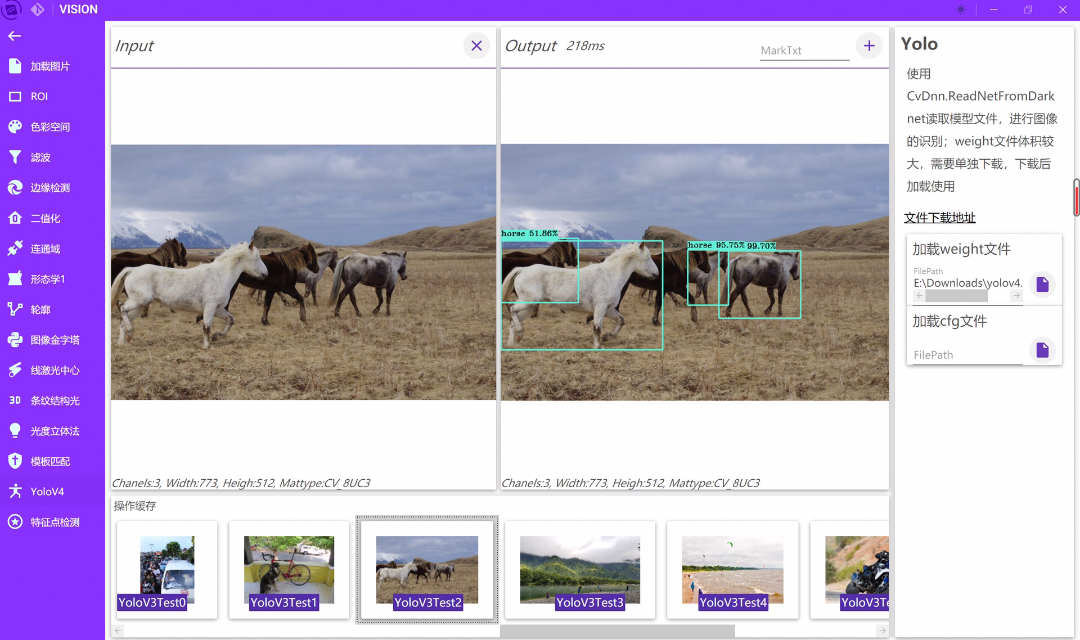
这是一个使用.net 6 基于wpf 、OpencvSharp(opencv的.net wrapper)、ReactiveUI等开发的自用工具,主要用来做ReactiveUI与OpencvSharp学习过程中的尝试以及opencv算子参数的调试等,该程序还可以显示3D点云数据(目前程序中的点云数据是由格雷码条纹拍摄的照片反算生成了,还可以导入标准的3d格式的文件stl、obj、objz、ply、3
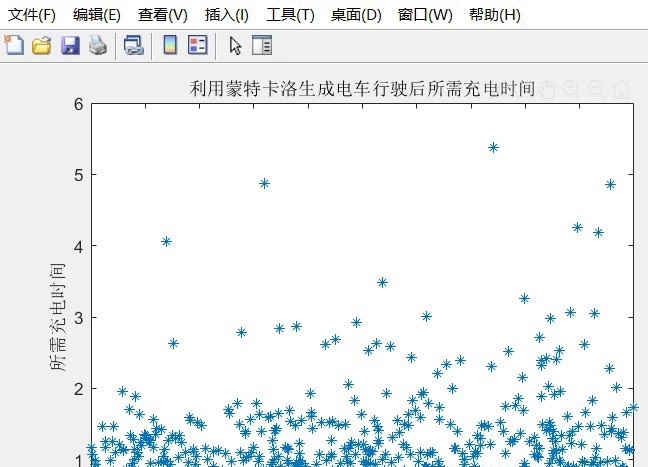
基于蒙特卡洛抽样的电动汽车充电负荷计算(matlab代码版)主要内容:代码主要主要研究的的是大规模电动汽车的蒙特卡洛模拟,包括电动汽车起始充电时间以及每日行使里程的概率密度分布,在此基础上,进一步计算基于蒙特卡洛模拟法的电动汽车充放电负荷的计算,每一部分的代码都在分块的子文件夹里,代码非常清晰,思路也很明朗,非常好懂,质量很高,联系后会直接发您资料,保证您学得会,用的起来,简直是萌新福利实现效果:
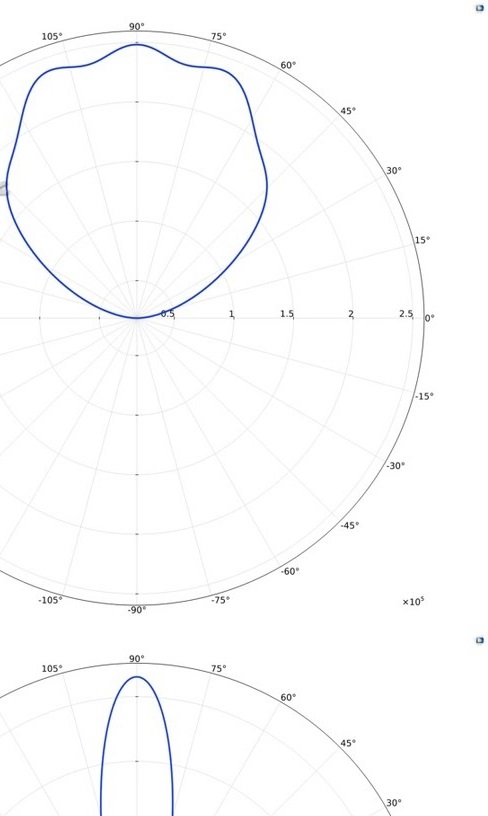
先建个基础结构,LED芯片咱们用GaN材料,外面裹层环氧树脂。θ_c = arcsin(n2/n1),当环氧树脂(n=1.5)遇上GaN(n=2.5),临界角大概36.87度,咱们故意把锯齿角度搞大点,让特定角度以上的光全反射回去。最近实验室里几个工程师在讨论LED单向出射结构的设计,这玩意儿在汽车大灯和投影仪里特别重要。传统LED四面八方漏光的毛病让工程师们头大,今天咱们就用COMSOL搞个骚操
实现相位偏折术(PMD)中的相位计算与解包裹,用于恢复物体表面的法线或形状信息,适用于镜面或半镜面表面的光学测量。