- @yjw0911
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
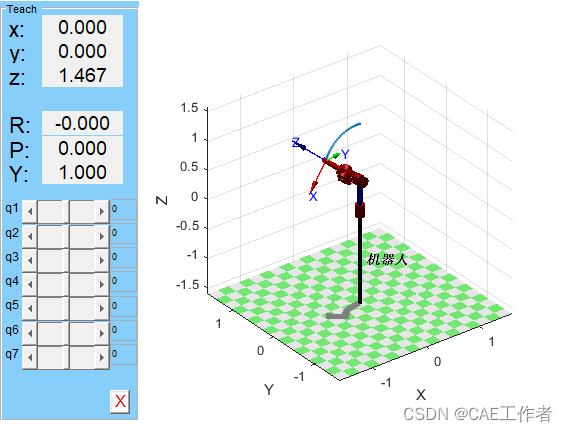
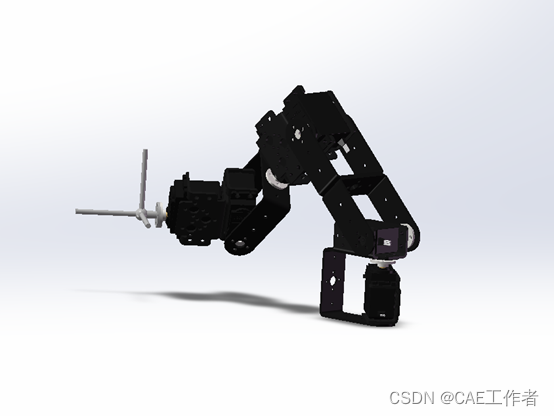
六轴可视化机械臂仿真(三维模型导入matlab)
资料下载链接https://download.csdn.net/download/yjw0911/85383686clear;clcclose all%thetadaalphaqlimoffsetL(1) = Link(‘d’,0.49825 ,‘a’ , 0 , ‘alpha’,pi/2 ,‘offset’,0);L(2) = Link(‘d’,0 ,‘a’ , 0.122 , ‘alpha’,
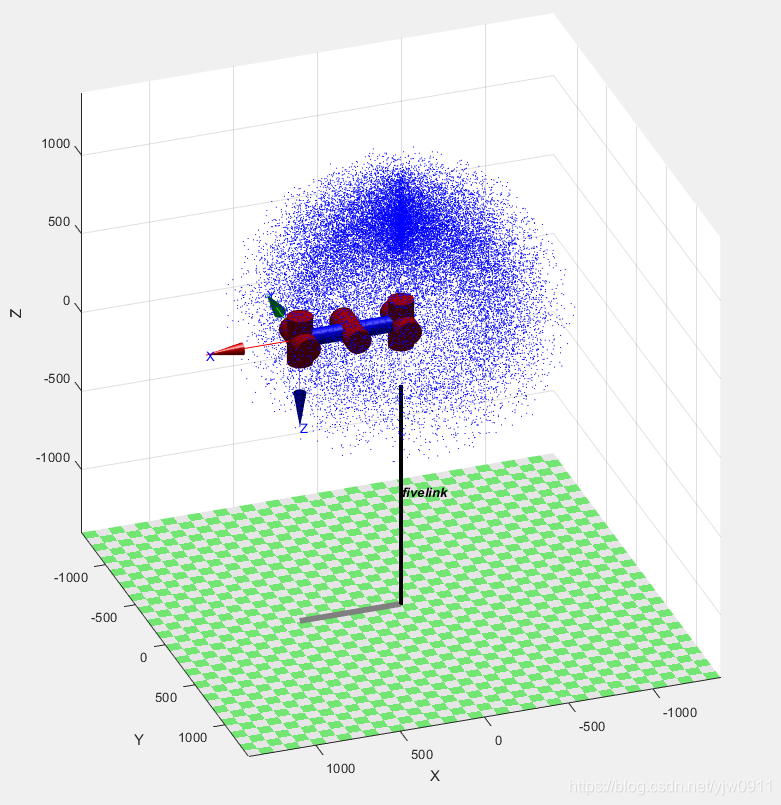
一、目的1、设计一个六自由度机器人,至少包含一个伸缩关节,要求机器人工作空间能满足分拣工位要求。2、根据自己设计的机器人,建立DH坐标系,设定各关节变量的取值范围,并列出齐次变换矩阵并在matlab进行仿真。二、内容1、下载并安装MATLAB里的 Robotic机器人工具箱。2、编写机器人位姿运动学方程,即给定关节变量,求解机器人末端相对于基坐标的齐次变换矩阵。并在此基础上,用工具箱里的命令fki
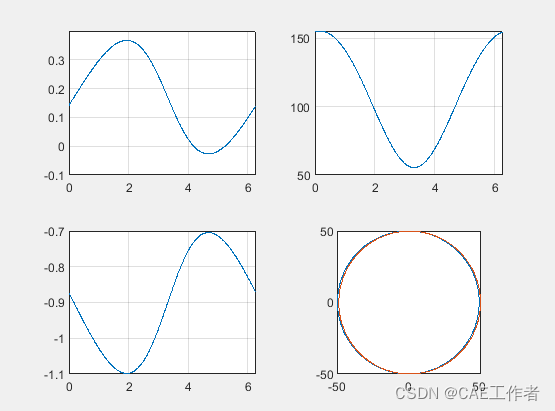
下载链接:https://download.csdn.net/download/yjw0911/85111527clcclear allclose allM=300;l=150;L=50;t=0:0.01:2pi;%圆的角度r=50;%圆的角度x=rcos(t);%圆轨迹x的坐标y=rsin(t);%圆轨迹y的坐标phi=pi/6;%代表末端的姿态% x=-50:0.01:50;%x的范围TE3=
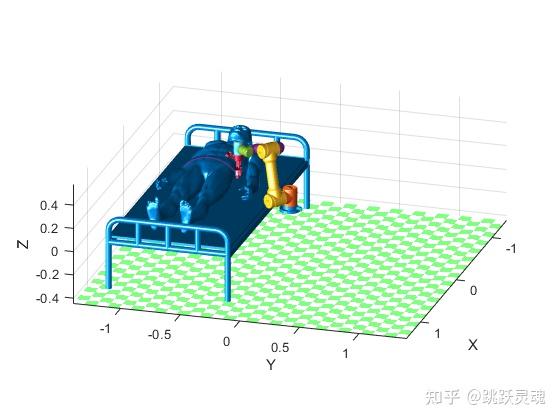
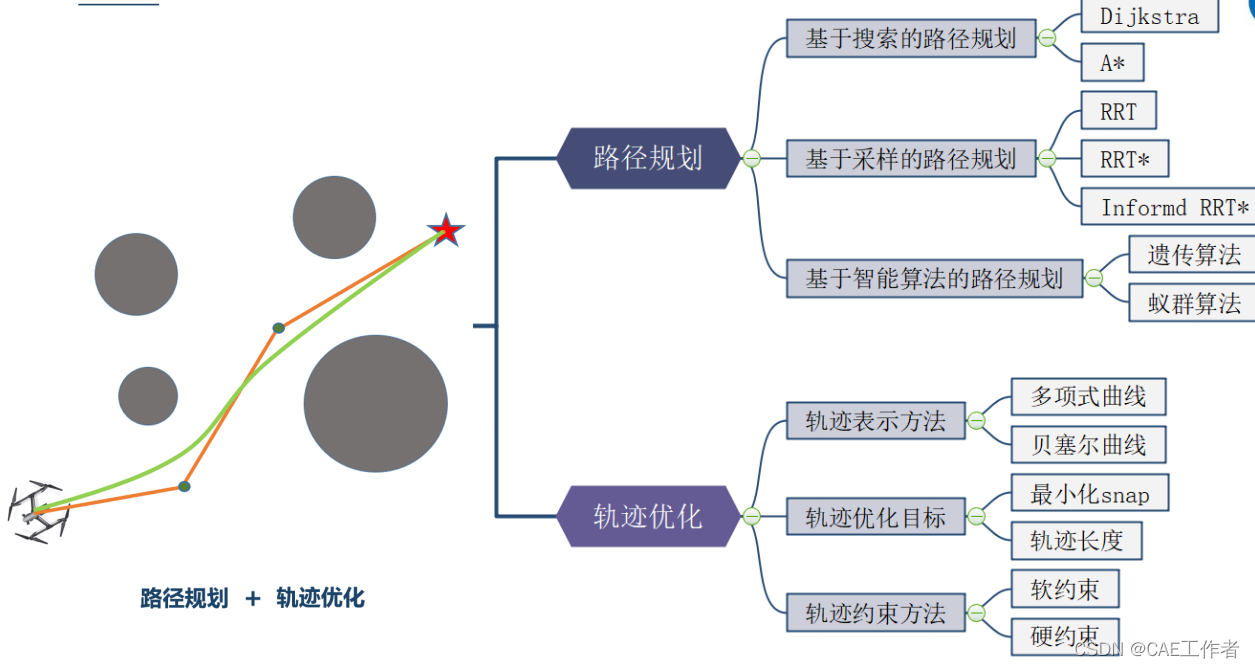
下载https://download.csdn.net/download/yjw0911/850019961、三维避障路径规划2、路径规划仿真
下载链接https://download.csdn.net/download/yjw0911/84696762
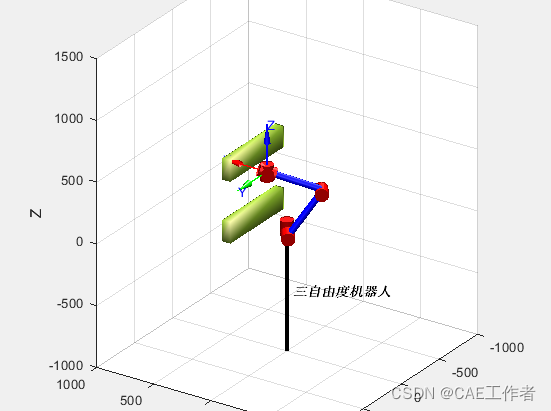
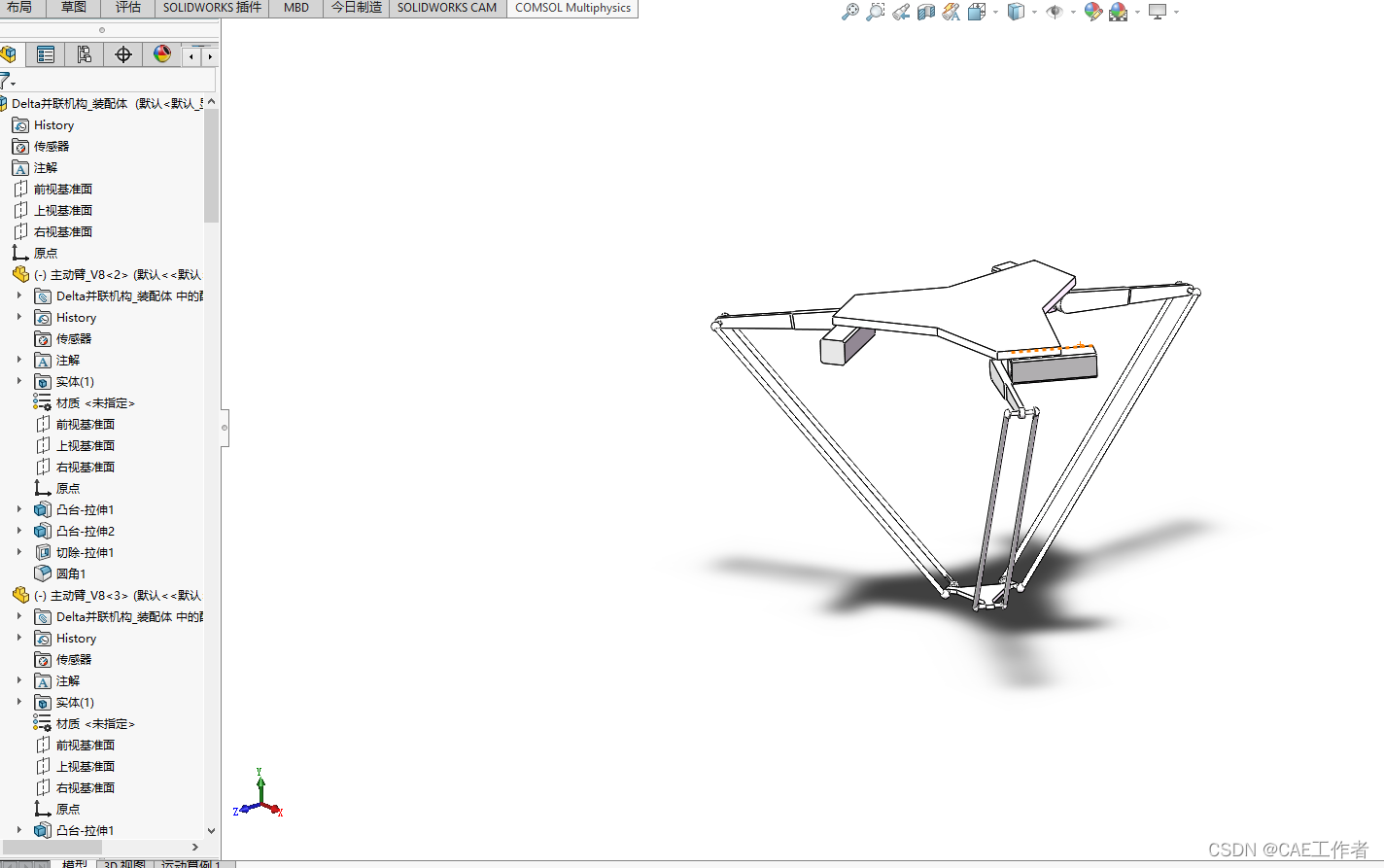
三自由度机构运动学分析与matlab仿真(三维模型+word报告+matlab程序)
下载地址https://download.csdn.net/download/yjw0911/850032781、三维模型正逆运动分析过程:Delta机器人三维模型+正逆运动学分析+matlab代码资料https://download.csdn.net/download/yjw0911/85003278
所设计的机器人由多个连杆机构组成,其关节类型包括旋转关节和移动关节两种。利用Matlab中机器人仿真工具箱Robotics Tool中Link和SerialLink两个函数可建立机器人模型[ ]。式中,theta为关节变量;alpha为扭转角;sigma表示关节类型(0为旋转关节,1为移动关节);前四个参数分别对应表1中的 , , ,。%输入JD,即6个关节变量的值,求解正运动方程。6的数组,代表
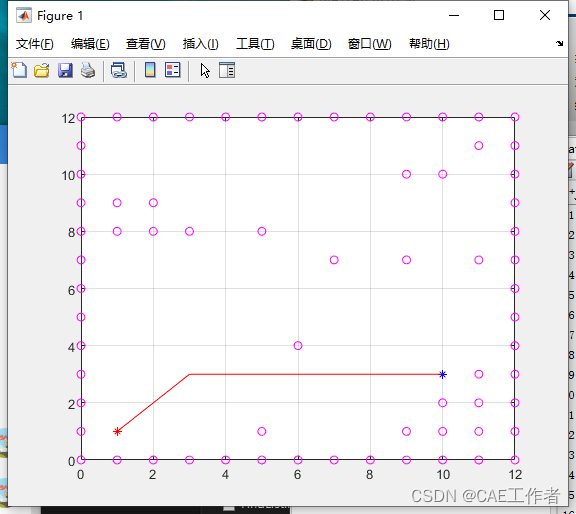
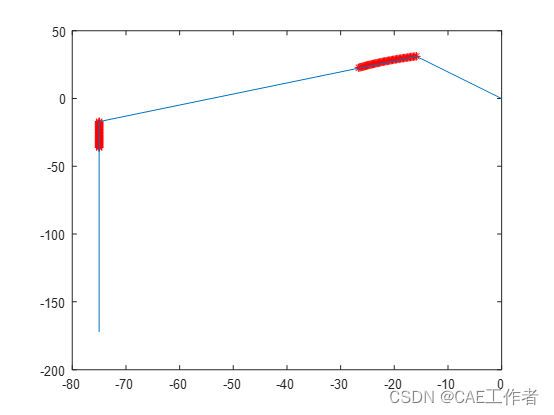
下载链接clcclear allclose alldisp('A Star Path Planing start!!')p.start=[1,1];%起始点p.goal=[10,3];%目标点p.XYMAX=11;obstacle=GetBoundary(p);%得到边界数据nObstacle=20;obstacle=GetObstacle(nObstacle,obstacle,p);path=A