




- @yasdasdp
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
摘要:本文介绍了使用GuiGuider工具为黄山派开发LVGL界面的过程。首先下载并安装NXP的GuiGuider工具,创建与黄山派匹配的LVGL8.3.10版本项目。通过导入多语言模板demo进行界面仿真,然后将生成的custom和generated文件夹移植到黄山派的lv_user目录中。最后修改main函数,替换原有的界面初始化代码为GuiGuider生成的setup_ui()函数,完成编译

本文介绍了在黄山派开发板上使用LVGL8和LSM6DS六轴传感器的过程。首先通过menuconfig配置传感器使能和I2C接口,然后创建lv_sensor.c/h文件实现传感器初始化、数据采集等功能。在LVGL界面中创建标签控件,通过定时器实时更新并显示陀螺仪数据。最终实现了一个带背景色切换按钮和实时陀螺仪数据显示的GUI界面。文章详细说明了配置步骤、代码实现方法及传感器数据读取显示的完整流程。
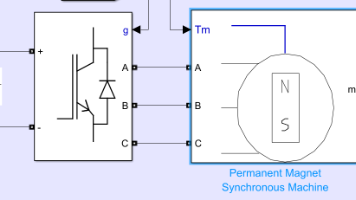
本文介绍了电力电子系统仿真中的电源模块、驱动模块和电机模块,重点解析了永磁同步电机(PMSM)模块的配置与参数设置。电源模块提供直流电压源,通用桥模块实现电力电子变流功能。PMSM模块可模拟三相或五相永磁同步电机的电气机械特性,支持正弦波或梯形波反电动势波形,并可通过参数配置实现不同的转子类型和机械输入模式。文章详细说明了定子电阻、电感、永磁体磁链等关键参数的含义及设置方法,以及初始条件和离散求解
高频注入法(HFI)是无感FOC中低速工况下的关键技术,通过向电机注入高频信号(500Hz-2kHz),利用IPMSM等凸极电机(Ld≠Lq)的特性获取转子位置。主要方法包括旋转高频电压注入和脉振高频电压注入,通过带通滤波和同步解调处理响应电流,再用PLL提取位置信息。该方法适用于零速/低速控制,但对非凸极电机无效,且存在噪声和计算复杂度问题。实际应用中需平衡注入幅值、处理信号干扰,并在高速时切换
继续输入build_sf32lb52-lchspi-ulp_hcpu\uart_download.bat。继续输入编译的命令scons --board=sf32lb52-lchspi-ulp -j8。这里我用的vofa查看的端口,可以选择设备管理器或者别的串口助手,我这里是端口15。首先是一些常用的命令,各位可以保存下。然后找到watch ui 的project目录,如我的是。首先去sf32的sd

MOSFET、BJT和IGBT是三种常见功率器件,各有特点:MOSFET为电压控制,输入阻抗高,开关速度快,适合低压高频应用;BJT电流控制,成本低但驱动复杂,多用于低频场景;IGBT兼具MOSFET和BJT优点,电压控制且耐高压,适合大功率场合。选型需考虑电压、频率和成本因素,低压高频选MOSFET,高压大功率用IGBT,中压低频可考虑BJT。三者特性互补,需根据具体应用需求选择。
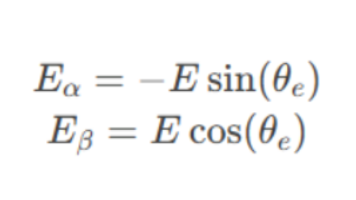
在电机无传感器控制(Sensorless Control)中,PLL用于从滑模观测器(SMO)或反电动势(Back-EMF)信号中提取转子位置和转速信息。在滑模观测器(SMO)或龙伯格观测器(Luenberger Observer)中,反电动势(Back-EMF)的估计值(Êα, Êβ)包含转子位置信息。PLL的输入是反电动势估计值(Êα, Êβ),输出是估计角度(θ̂)。在数字PLL(如
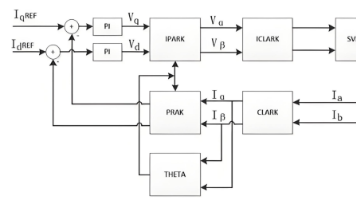
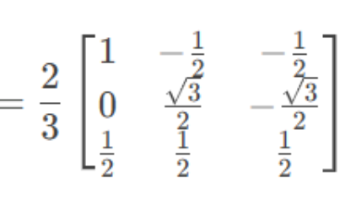
本文系统对比了磁场定向控制(FOC)中两种坐标变换方法:等幅值变换与等功率变换。等幅值变换保持信号幅值不变,但需功率补偿系数,适用于SVPWM调制等控制场景;等功率变换保持功率守恒,适合能量分析与无传感器控制。两种变换在Clark变换阶段系数不同(等幅值为1,等功率为√(2/3)),导致控制实现存在差异:等幅值需电流环后补偿,等功率可直接使用变换结果。实际应用中,TI电机库多采用等幅值变换,而学术
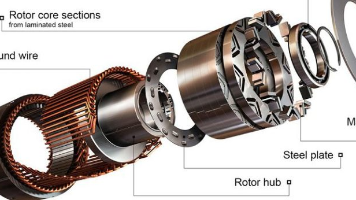
摘要: 永磁同步电机(PMSM)分为内嵌式(IPM)和表贴式(SPM)两种结构。IPM电机永磁体嵌入转子内部,机械强度高,具有凸极效应(Ld≠Lq),转矩由永磁转矩和磁阻转矩共同组成,适合高速、宽调速应用(如电动汽车),但控制复杂。SPM电机永磁体粘贴在转子表面,结构简单(Ld≈Lq),转矩主要依赖永磁转矩,控制易实现但高速性能受限,适用于家电、机器人等场景。IPM功率密度高,SPM成本低,二者各
V/F和I/F启动是永磁同步电机无感控制的两种开环策略。V/F通过固定电压频率比驱动电机,适用于高压系统,抗干扰强但负载适应性差;I/F采用电流闭环控制,启动更平稳且易于过渡到闭环观测器,但对电流采样精度要求高。V/F适合高压简单应用,I/F更适用于需要平稳启动的场景。两者在闭环切换难度和负载适应性上存在显著差异。