- @xoCxIDrpRmTZ
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
基于长短神经网络LSTM做多特征输入单输出的二分类及多分类模型。程序内注释详细,直接替换数据就可以用。程序语言为matlab。程序可出分类效果图,迭代优化图,混淆矩阵图具体效果如下所示。在机器学习领域,长短时记忆网络(LSTM)凭借其处理序列数据的独特优势,在众多分类任务中崭露头角。今天咱们就来聊聊如何用Matlab基于LSTM搭建多特征输入单输出的二分类及多分类模型。

假设用户数量% 运营商成本参数% 用户的基础用电需求% 用户的光伏发电量这里简单地定义了一些基础参数,比如用户数量、运营商成本,还有随机生成的用户基础用电需求和光伏发电量。这些参数是后续计算的基础,它们模拟了现实中用户用电和发电的不确定性。
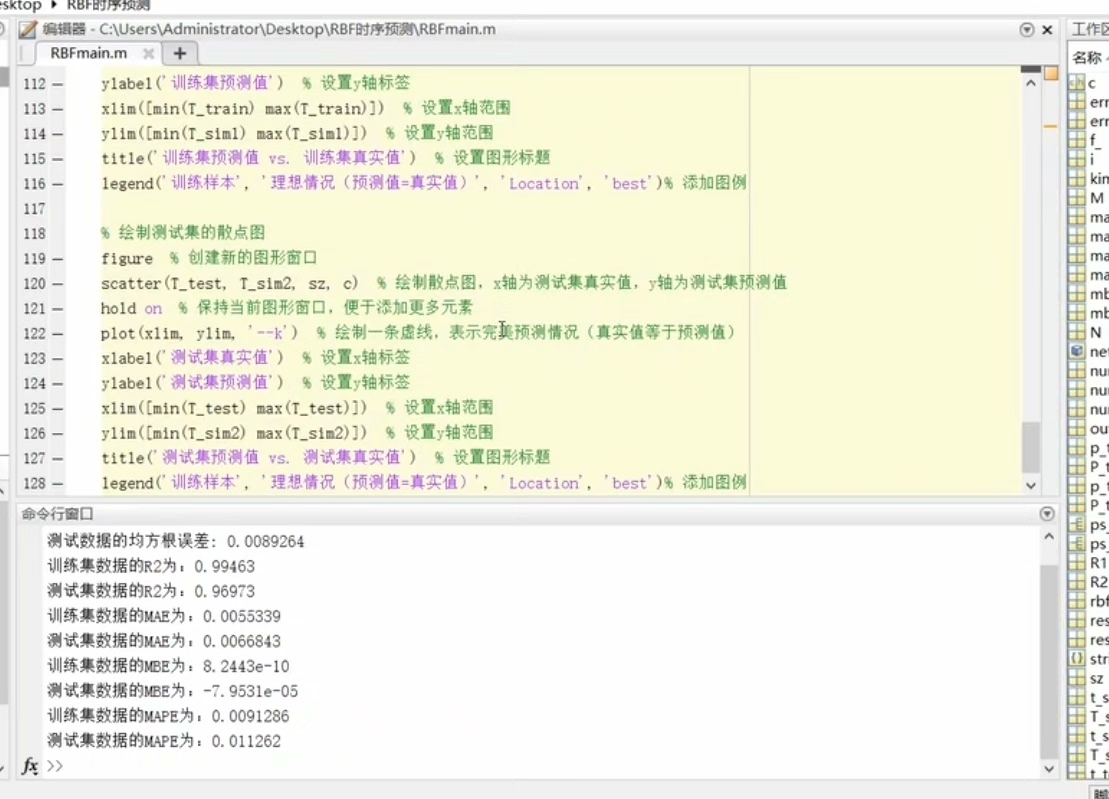
刚好手头有个MATLAB实现的案例,带大家看看怎么用这个工具包实现时序预测,顺便聊聊代码里藏着的门道。总体来说,这段代码实现了使用粒子群算法优化神经网络的权值和阈值,以提高神经网络在回归任务上的预测性能,并对优化后的模型进行评估和可视化。总体来说,这段代码实现了使用粒子群算法优化神经网络的权值和阈值,以提高神经网络在回归任务上的预测性能,并对优化后的模型进行评估和可视化。实测某电力负荷预测场景中,
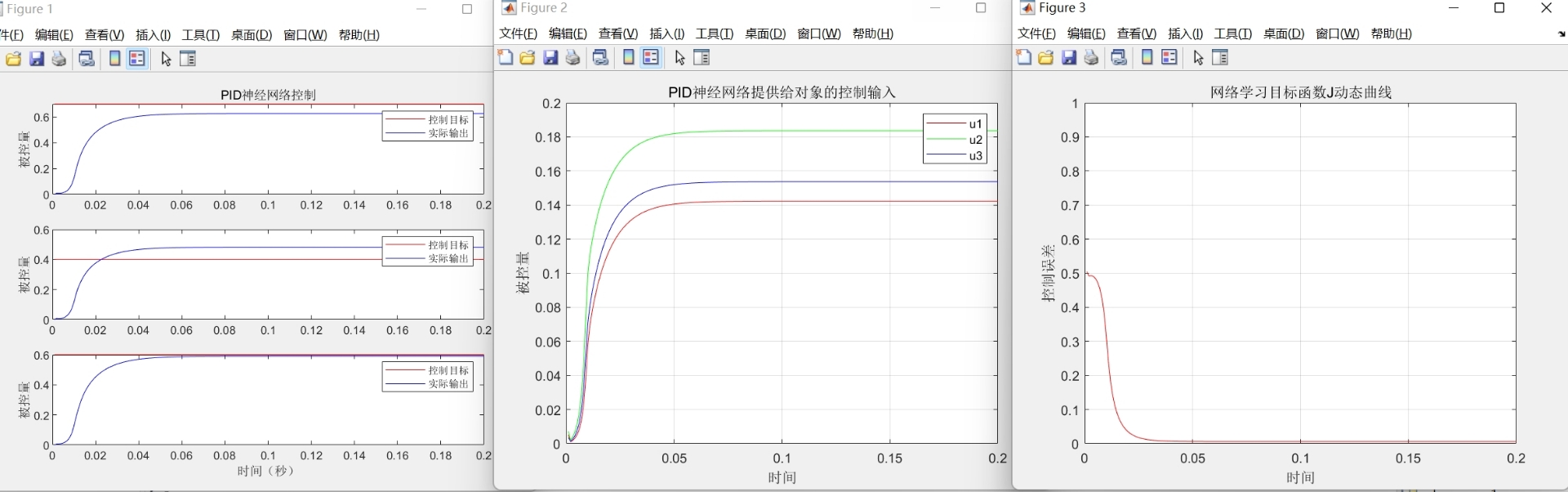
PSO优化神经元网络解耦控制主要分为神经元网络结构确定,PSO算法优化神经元网络和神经元网络控制三个部分组成,其中神经元网络结构确定根据控制对象输入输出数量确定网络的输入层,隐含层,输出层节点数目,得到了粒子的长度。PSO优化神经元网络解耦控制主要分为神经元网络结构确定,PSO算法优化神经元网络和神经元网络控制三个部分组成,其中神经元网络结构确定根据控制对象输入输出数量确定网络的输入层,隐含层,输
单目结构光三维重建,MATLAB代码,包括多频外差和格雷码相移。只出资料不接设计最近在研究单目结构光三维重建,发现了一些有意思的MATLAB代码,这里来和大家分享一下。
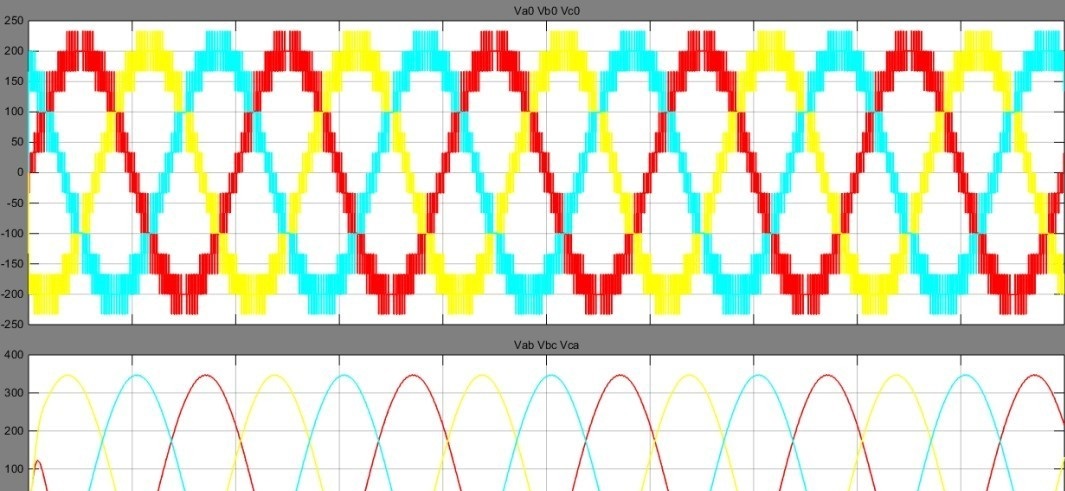
接下来上硬菜——钳位电路。在Simulink里摆二极管模块时得注意极性方向,不然仿真跑起来直接给你表演电压跳水。不过要注意输出电压的dvd/dt,仿真里看到超过5000V/μs就得检查钳位二极管的反向恢复时间参数是不是设短了。五电平逆变器这玩意儿比普通三电平刺激多了,关键是二极管钳位这个操作——说白了就是用二极管把电压钉死在特定台阶上,就像给跳楼机装了五层缓冲垫似的。模型跑顺了之后试着把调制比拉到
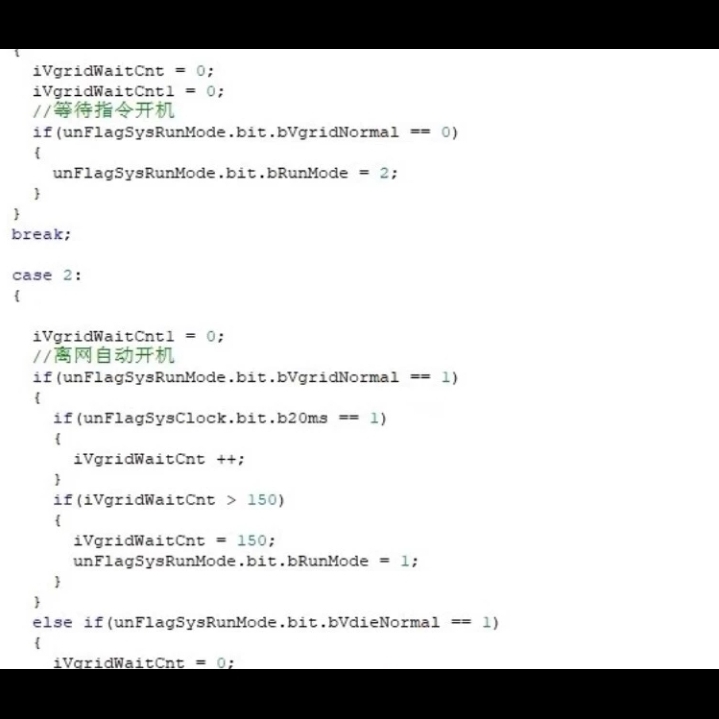
逆变器STM32储能逆变器BOOST 全桥基于STM32F103设计,具有并网充电、放电;并网离网自动切换;485通讯,在线升级;风扇智能控制,提供过流、过压、短路、过温等全方位保护。基于arm的方案区别于dsp。有PCB、原理图及代码。嘿,各位电子爱好者们!今天咱们来聊聊基于STM32F103设计的储能逆变器,它可是融合了BOOST全桥等技术,功能那叫一个强大!
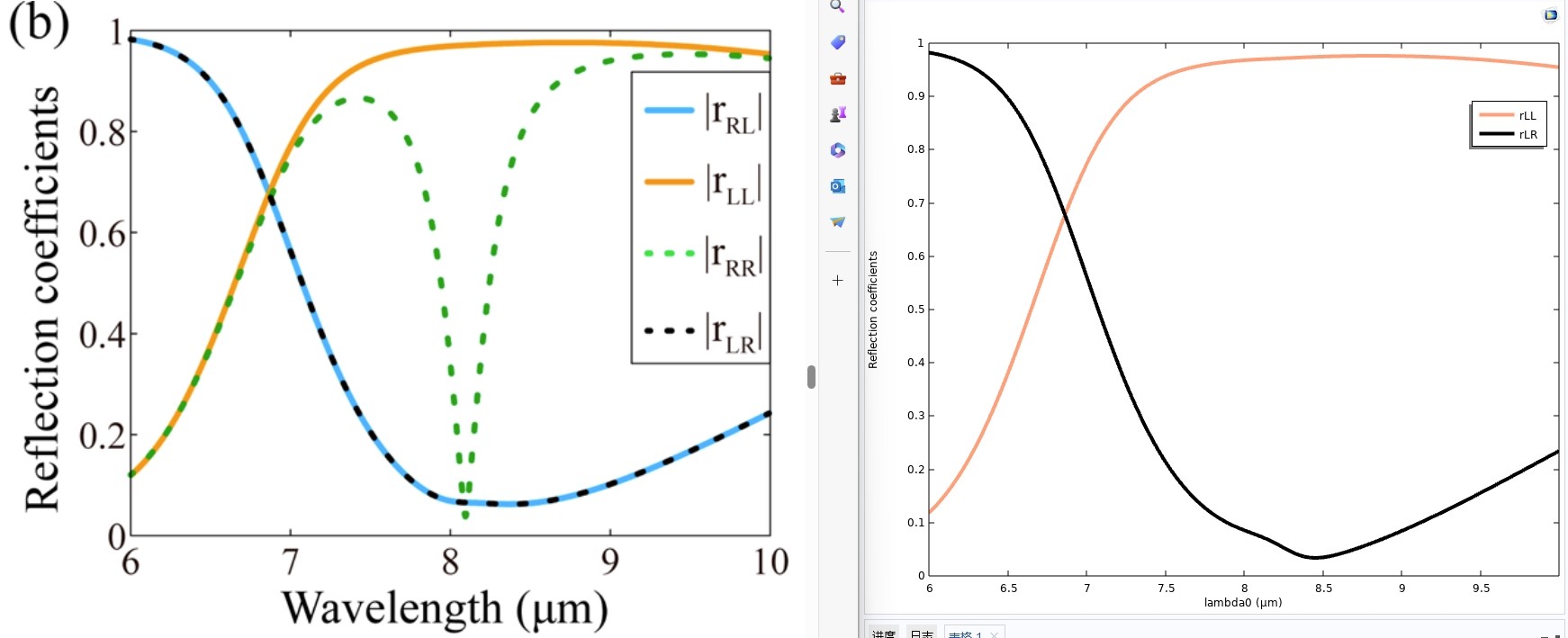
comsol异形超表面手性消光圆二向色镜在光学领域,超表面技术正引领着一场变革,尤其是在构建具有独特光学特性的元件方面。今天咱们来聊聊 Comsol 模拟下的异形超表面手性消光圆二向色镜,这可是个有趣又充满挑战的研究点。
首先,我们得定义一个地图。假设地图是一个二维矩阵,0 表示可通行区域,1 表示障碍物。# 自定义地图这样,我们就有了一个简单的 5x5 的地图。
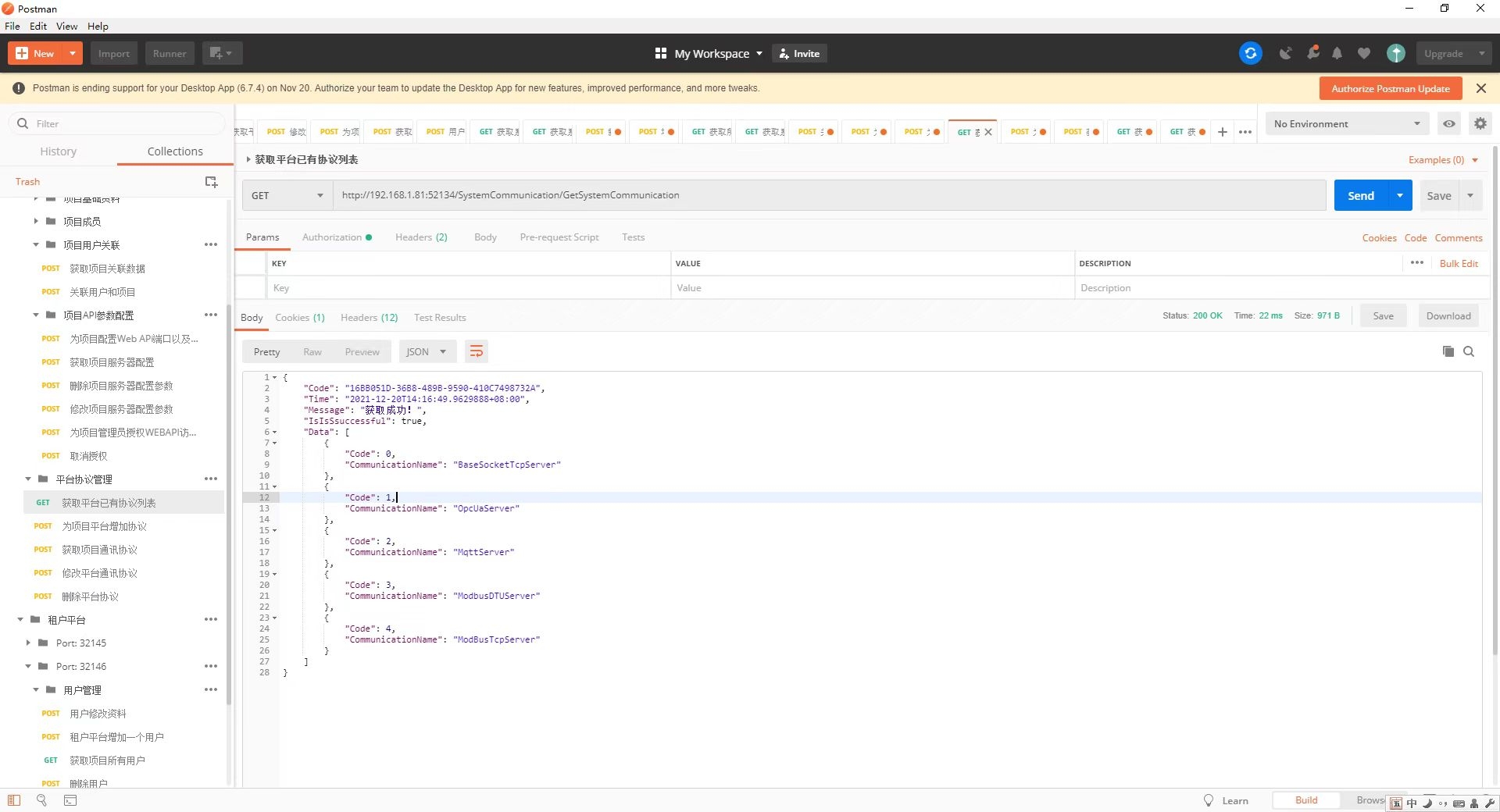
多租户物联网平台服务器框架是根据多年经验以及实际客户需求而研发。主要技术基于高性能、高并发的IOCP Sokect基础上研发而成。目前使用的C#语言开发,运行于Windows平台,后期会推出跨平台支持版本,Java版本等等。集成于Web API、Web服务器、MQTT服务器、Socket TCP服务器、OPC UA服务器、Modbus DTU服务器、Modbus TCP服务器于一体的服务器框架。无