




- @xiongqi123123
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
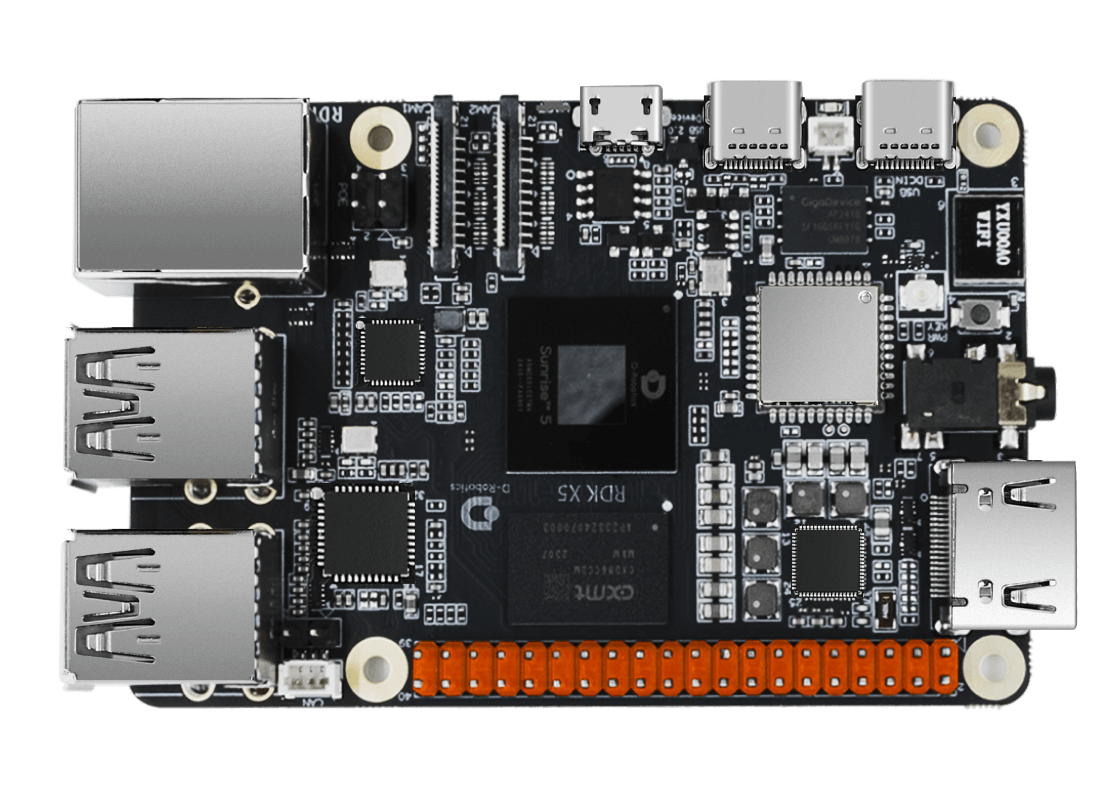
买了RDK X5还只停留在树莓派的使用思想?想部署深度学习但对着BPU不知从何下手?好不容易找到了OE交付包和Model Zoo但不知有什么作用?我知道你很急,但你先别急!跟着这篇学弟一看就会的模型量化部署教程包你30Min告别RDK模型量化部署小白!!!首先我们本篇教程参考一下资料及文档:目前,我们在GPU上训练的模型通常采用浮点数格式,因为浮点类型能够提供较高的计算精度和灵活性,但是对于边缘式
MacOS下VSCode开发STM32嵌入式环境配置指南 本文详细介绍了在MacOS系统下使用VSCode搭建STM32开发环境的完整流程。作者基于自身从嵌入式开发转向算法视觉后又回归嵌入式开发的经历,分享了最新的开发方案。主要内容包括: 环境准备:列出必需软件(VS Code、STM32CubeMX、OpenOCD等)及安装方法 VSCode插件配置:重点介绍STM32CubeIDE插件及辅助开
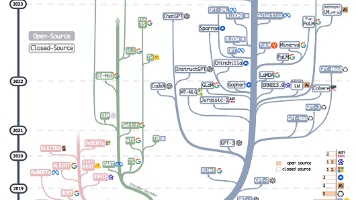
本文综述了双臂具身视觉-语言-动作(VLA)模型的起源与发展。文章首先回顾了大语言模型(LLM)向具身智能的范式跃迁,指出传统机械臂控制方法在开放环境中的局限性,以及VLA模型如何实现感知-决策-控制的统一。随后重点分析了Google DeepMind的RT系列模型的开创性贡献与双臂场景下的不足,包括动作离散化带来的精度问题。文章进一步梳理了双臂VLA的阶段性发展:斯坦福ALOHA平台与ACT模型
本文介绍了基于地瓜机器人OE-LLM工具链对SigLip视觉编码器进行量化部署的完整流程。作者以siglip-so400m-patch14-384模型为例,详细记录了从环境配置、权重下载到量化编译的全过程。文章重点分析了OE-LLM与传统PTQ方法的区别,指出其采用"模型重构+校准+编译导出"的独特流程,并列举了常用的量化组件。通过将原始PyTorch模型改写为Leap可识别的
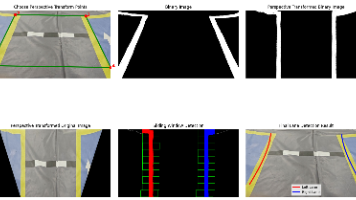
本文介绍了机器人/智能车视觉巡线中的经典策略"滑动窗口+直方图法"。该方法通过图像直方图快速定位车道线起始位置,利用滑动窗口跟踪车道线轨迹,最后通过多项式拟合生成导航路径。系统实现包括:使用直方图统计车道线像素分布,确定初始位置、滑动窗口法从底部向上逐层搜索,稳定跟踪车道线、二阶多项式拟合离散点生成连续路径、摄像头标定和透视变换解决视角畸变问题该方法计算量小、鲁棒性强,适合各类巡线任务。文章提供了
Microcontroller Development Kit(简称 MDK),是 ARM 旗下公司 Keil 为 ARM 系列单片机 开发的一款便捷的开发工具,支持市面上绝大部分的单片机系列。STM32CubeMX 是 ST 意法半导体近几年来大力推荐的STM32 芯片图形化配置工具,目的就是为了方便开发者,允许用户使用图形化向导生成C初始化代码,可以大大减轻开发工作,时间和费用,提高开发效率。

本文介绍了如何利用开源项目 AI-Vibe-Writing-Skills 结合 VS Code 打造个性化的 AI 论文写作助手。文章首先指导读者配置 LaTeX 编译环境,安装必要的插件,并设置项目目录结构。重点展示了如何通过风格迁移功能让 AI 学习作者的写作风格,实现不同论文风格的灵活切换。该项目提供多个智能体(如 Outline Manager、Content Writer)来辅助论文写作
本文介绍了机器人/智能车视觉巡线中的经典策略"滑动窗口+直方图法"。该方法通过图像直方图快速定位车道线起始位置,利用滑动窗口跟踪车道线轨迹,最后通过多项式拟合生成导航路径。系统实现包括:使用直方图统计车道线像素分布,确定初始位置、滑动窗口法从底部向上逐层搜索,稳定跟踪车道线、二阶多项式拟合离散点生成连续路径、摄像头标定和透视变换解决视角畸变问题该方法计算量小、鲁棒性强,适合各类巡线任务。文章提供了
Microcontroller Development Kit(简称 MDK),是 ARM 旗下公司 Keil 为 ARM 系列单片机 开发的一款便捷的开发工具,支持市面上绝大部分的单片机系列。STM32CubeMX 是 ST 意法半导体近几年来大力推荐的STM32 芯片图形化配置工具,目的就是为了方便开发者,允许用户使用图形化向导生成C初始化代码,可以大大减轻开发工作,时间和费用,提高开发效率。
本文介绍了机器人/智能车视觉巡线中的经典策略"滑动窗口+直方图法"。该方法通过图像直方图快速定位车道线起始位置,利用滑动窗口跟踪车道线轨迹,最后通过多项式拟合生成导航路径。系统实现包括:使用直方图统计车道线像素分布,确定初始位置、滑动窗口法从底部向上逐层搜索,稳定跟踪车道线、二阶多项式拟合离散点生成连续路径、摄像头标定和透视变换解决视角畸变问题该方法计算量小、鲁棒性强,适合各类巡线任务。文章提供了