




- @xiaoding_ding
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
第四步,在终端中,还是一样的编译自己的代码,交叉工具链还是自己的板子,安装自己对应的,用自己的就好。第二步,安装VScode和相关插件,可以看下官方的setup,安装这个命令安装。第一步下载安装Linux版的VScode,Ubuntu版的下载deb包。第五步,远程登录到开发板,终端搞个分屏,用SSH命令登录。这就是整个开发环境的搭建,大家根据实际需要可以调整一下。第三步,从码云上克隆自己的包,大致
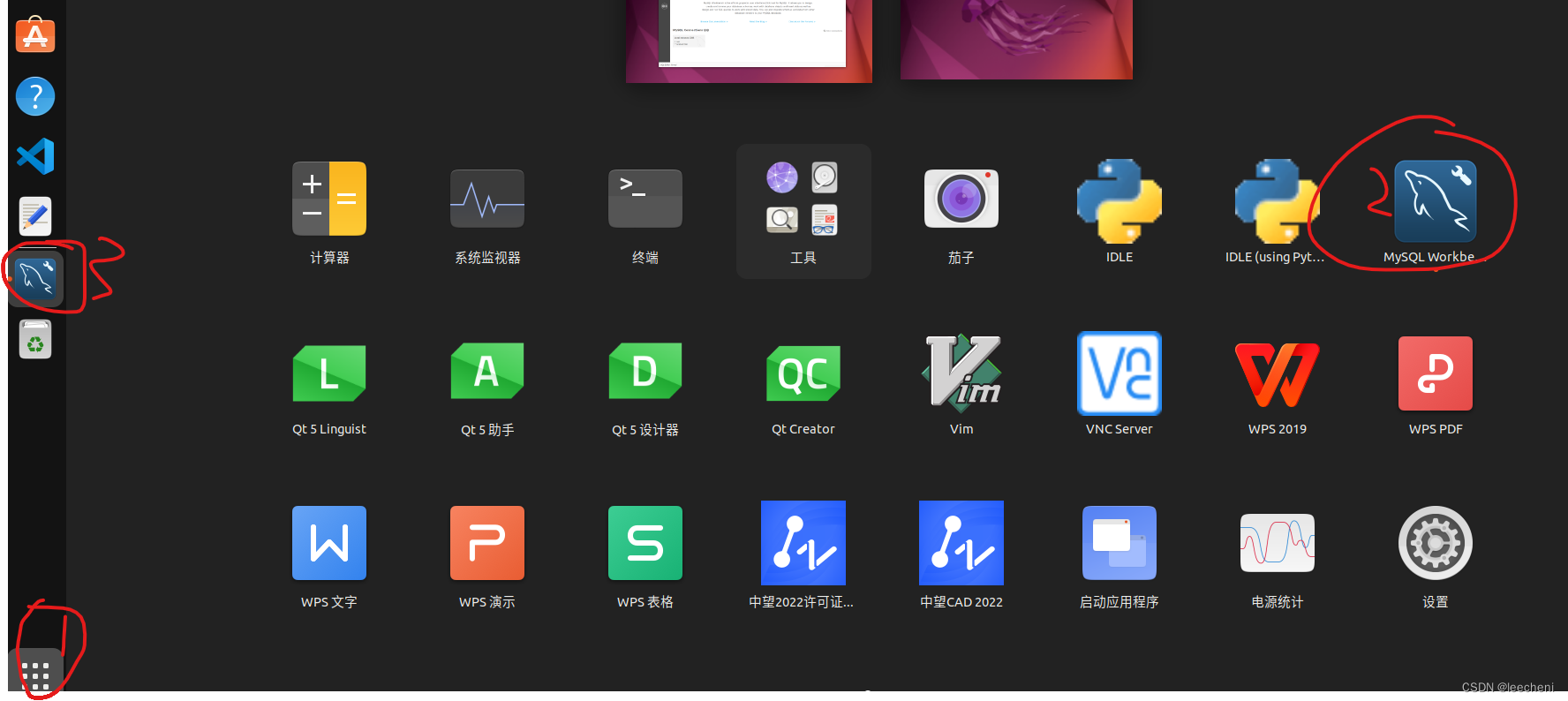
打开ubuntu软件中心,搜索如下字符,安装这个社区版的workbench。
FreeCAD 还有一个有趣的工作台可以探索:电子表格工作台。这个工作台允许直接在FreeCAD 中创建电子表格,如用 Excel 或 LibreOffice 制作的电子表格。这些电子表格可以用从模型中提取的数据填充,也可以在值之间执行一系列计算。电子表格可以导出为 CSV 文件,可以导入到任何其他电子表格应用程序中。然而,在 FreeCAD 中,电子表格有一个额外的功能:它们的单元格可以接收一个
打开ubuntu软件中心,搜索如下字符,安装这个社区版的workbench。
本例展示了用QT增加一个网页视图,背景是kuka示教器界面,中间增加UR的VNC网页界面显示。本人博客中一起有写过ros2运行UR的操作。

正确配置3D打印是一个复杂的过程,你必须对你的3D打印机有很好的了解,所以在实际打印之前生成G代码并不是很有用(你的G代码文件可能在其他打印机上不能很好地工作),但无论如何对我们来说是有用的,可以检查我们的STL文件是否可以毫无问题地打印。当您在3D中打印对象时,最重要的是您的对象是实心的。请注意,与之前的口袋一样,由于我们使用基础块的顶面作为最新草图的基底,因此我们对该草图进行的任何PartDe
$cd /usr/share/gazebo-7/worlds$gazebo willowgarage.world打开gazebo的时候会发现一直处于这种状态,这是因为model库加载不正确导致的。解决办法:$ cd ~/$ hg clone https://bitbucket.org/osrf/gazebo_models下载完成后讲ga