- @weixin_64037346
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
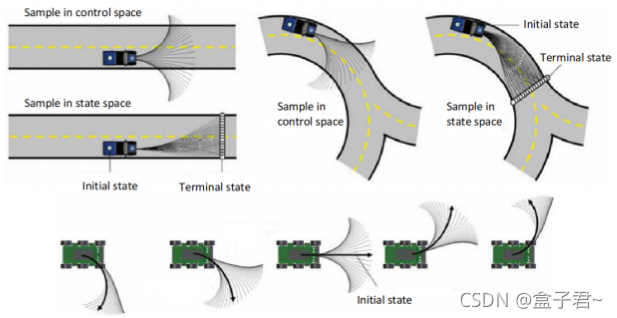
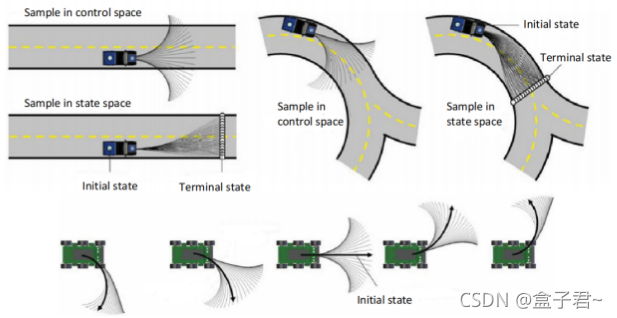
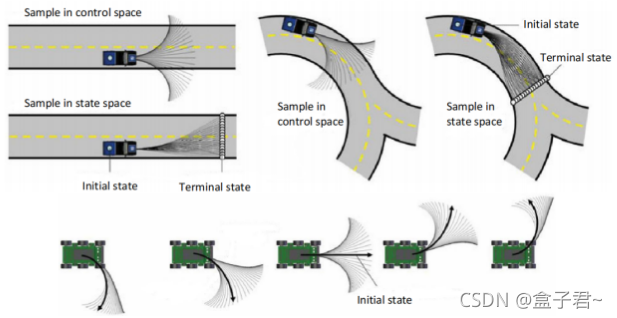
介绍Voronoi图的生成方法,并使用Voronoi Diagram进行路径规划,Voronoi Planner实现在地图中查找一条安全路径,最大程度的避开障碍物。最后对比Voronio Planner 与 采样思想的Sample Planner各自的算法特性。添加图片注释,不超过 140 字(可选)
覆盖式路径规划常用于扫地机、割草机的全覆盖扫地、拖地、割草等作业路径的规划,也常用于农业无人机的全覆盖喷播作业路径的规划。本文介绍覆盖式路径探索(CCPP)的类型(工字形覆盖路径、回字形覆盖路径,分块弓回字形覆盖路径,十字交叉形覆盖路径等),介绍覆盖式路径探索需解决的关键问题和技术指标。最后介绍覆盖式路径探索的常用方法。
介绍第三类非邻接节点的遍历搜索的算法如何应用在全局路径上,详细分析jump point search(JPS)跳点搜索算法的原理及源码。最后对比JPS算法和A*算法的特性。
认知有限,望大家多多包涵,有什么问题也希望能够与大家多交流,共同成长!本文先对多传感器标定、数据融合与状态估计导读做个简单的介绍,具体内容后续再更,其他模块可以参考去我其他文章提示:以下是本篇文章正文内容。
介绍机器人/无人驾驶常用的数据采集方案,单机器人采集和多机器人采集等等。

介绍目标检测模块的输入输出及算法流程,包括image detector、lidar_detector(clustering)、fusion_tools、objects fusion等等。

体素滤波器是一种下采样的滤波器,它的作用是使用体素化方法减少点云数量,采用体素格中接近中心点的点替代体素内的所有点云,是会移动点的位置。这种方式即减少点云数据,并同时保存点云的形状特征,在提高配准,曲面重建,形状识别等算法速度中非常实用。作用是在指定的维度方向上保留特定值域内的点,同时过滤掉不在这个范围内的点。它通过统计分析技术来识别并移除那些与周围点距离较远的离群点,这些离群点可能是由于测量误差

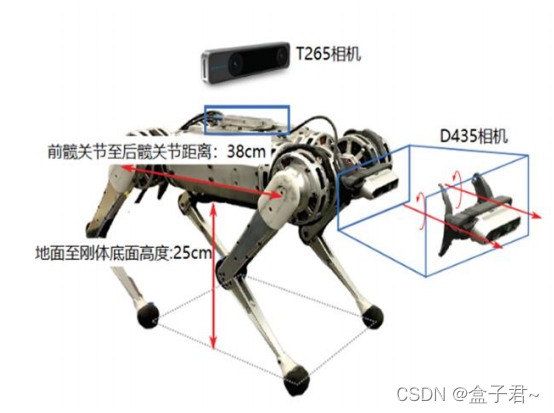
四足机器人运动控制相关教程及博客请关注专栏:四足机器人运动控制相关教程及博客机器人实战篇
电机关节控制器代码解析。四足机器人关节电机控制。