




- @weixin_57651568
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
本文系统介绍了将 AUTOSAR CP 风格的 XCP 协议栈移植到裸机 MCU 平台的全流程。首先分析了裸机环境与 AUTOSAR CP 标准环境的差异,以及移植面临的挑战(资源受限、无操作系统、需自行实现底层回调)。然后详细阐述了移植准备阶段的关键步骤:硬件资源评估、源码依赖分析、传输层裁剪(仅保留 XCP on CAN)、非必要功能关闭(动态 DAQ、时间戳、标定页切换、闪存编程、安全解锁等
作用存储一些多节点共享的数据,类似于全局变量。案例实现参数增删改查操作。注意:参数服务器不是为高性能而设计的,因此最好用于存储静态的非二进制的简单数据在 C++ 中实现参数服务器数据的增删改查,可以通过两套 API 实现:ros::NodeHandleros::param1.创建工作空间并初始化 mkdir -p demo03_ws/srccd demo03_wscatkin_make2.进入 s
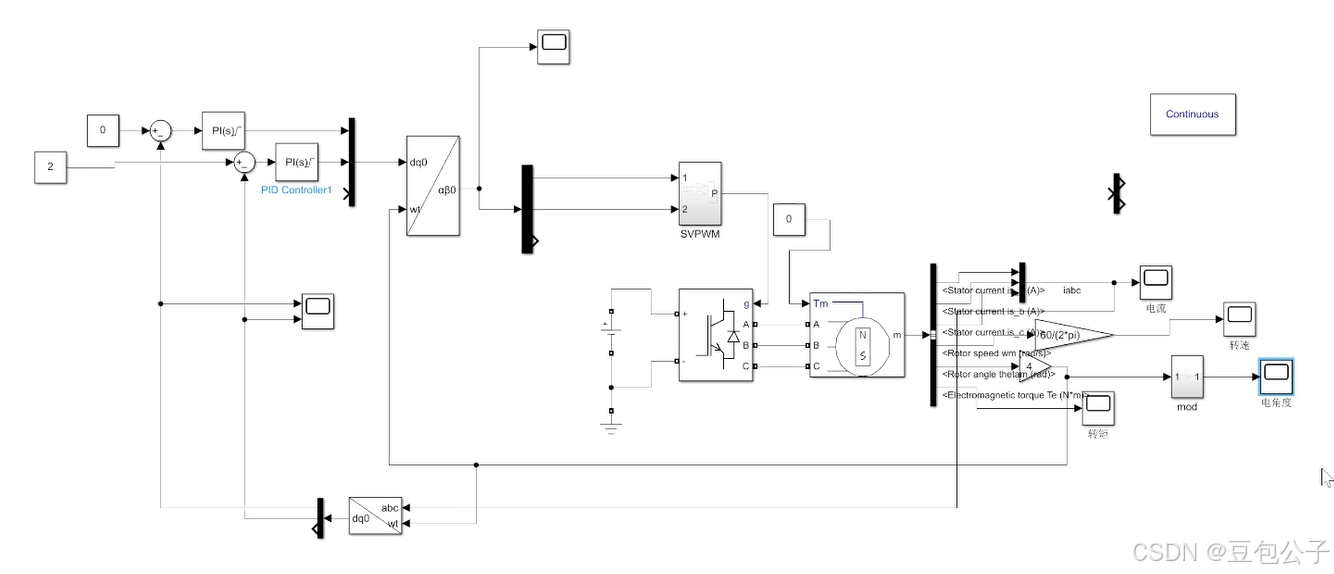
双击左键,搜索per,第一个为PMSM电机模型PMSM的电机模型中Tm为负载,ABC为三相线,m为电机内部的一些信息。提取m中的信息,通过Bus Selector模块来提取,选取电机信息:ABC相电流,转速,机械角度,转矩机械角度指的是转子相对于定子旋转的实际空间角度,这是肉眼可见的角度。在无刷直流电机(BLDC)的FOC(磁场定向控制)中,Park变换就是使用电角度来进行的。这是因为在电机控制中
再点击右编号插入公式, 即可对第二章的公式进行自动编号,到了第三章的操作依次类推。到了下一章,需要修章节编号改为2-1,打字点要在第二章那儿,点击插入分隔符。再点击右编号输入公式-即可自动插入编号,公式居中对齐。改成这样,点击-样式,将数字的字体部分斜体勾上即可。自动编号,先点击-插入编号-格式化-节编号。点击内联,插入公式--使用英文输入法。将节编号修改为2,确认。

科学研究方法与论文写作-课后习题答案