- @weixin_54742551
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
本文深入解析了LIN总线通信的五种帧类型及其应用场景。LIN总线采用主从式单线通信,通过调度表实现有序传输。无条件帧是最基础类型,用于主机查询从机数据或发送命令;事件触发帧优化多从机事件响应,仅状态变化的从机回复;诊断帧使用专用PID实现深度诊断功能。文章结合车窗控制实例,展示了如何通过不同帧类型实现防夹功能检测和故障诊断,体现了LIN协议在汽车电子系统中的高效协同机制。
回调函数是嵌入式系统中的核心编程机制,通过函数指针实现已存在函数对用户自定义函数的调用。其工作流程包括定义、注册和触发三个步骤,具有将控制流程与具体实现分离的特点。在嵌入式系统中,回调函数广泛应用于硬件中断处理、事件驱动编程和资源监控等场景,相比普通函数具有调用方式隐式、执行时机不确定等特性。典型应用包括按键中断处理、串口数据接收和ADC采集等,能有效解耦代码、提高执行效率并支持动态行为替换,是嵌
摘要: ARM Linker错误L6200E通常由全局变量在头文件中重复定义引起。示例中,shared.h直接定义变量导致main.o和sensor.o各自生成变量副本,链接时冲突。正确做法是:1)在头文件用extern声明变量(如extern uint32_t system_uptime_ms;);2)在单一源文件(如main.c)中定义变量。遵循"头文件声明,源文件定义"原
本文提出了一种分三步构建LIN通信系统的方案。首先实现基础通信功能,主从节点通过无条件帧进行问答式交互;然后增加事件触发机制,优化异常处理;最后扩展高级功能。文章详细介绍了第一步的实现方法,包括软件框架设计、共用库定义、主节点调度器和从节点中断处理的具体代码实现。主节点周期性发送命令帧头并接收响应,从节点在中断中处理接收到的帧头并回复数据,共同完成车窗状态查询和控制功能。
本文解析了串行通信的核心概念与技术层次。首先对比UART(异步)与USART(同步/异步)的特性差异,指出USART是UART的超集。接着从OSI模型出发,区分物理层(如TTL、RS-232、RS-485)与数据链路层(如SPI、I2C、CAN)的协议关系。在无线领域,蓝牙、WiFi和2.4G协议通过串口或SPI与单片机交互,模块内部处理复杂协议栈。最后通过关系图展示了单片机内部控制器与外部网络/
本文介绍了STM32 CAN总线通信的实现方法,重点讲解了单个设备环回测试和三个设备间通信的配置流程。主要内容包括:1)CAN外设初始化步骤(时钟配置、GPIO设置、CAN控制器参数配置、过滤器初始化);2)报文发送流程(使用CanTxMsg结构体和CAN_Transmit函数);3)报文接收流程(通过CAN_MessagePending检查状态,使用CAN_Receive读取数据)。文中还详细列
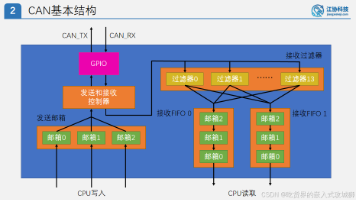
本文摘要: STM32 CAN外设教程重点讲解了STM32F103C8T6芯片的bxCAN外设。主要内容包括: CAN外设特性:支持CAN 2.0A/B协议,硬件自动处理报文收发、帧格式、错误检测等,最高支持1Mbps波特率。 硬件资源: 3个发送邮箱(缓冲区) 2个接收FIFO(可缓存6个报文) 14个过滤器组(用于报文筛选) 外围电路设计: CAN控制器+收发器(如TJA1050)构成节点 需

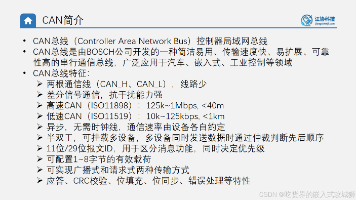
CAN总线技术解析与硬件设计要点 摘要:本文系统介绍了CAN总线技术及其硬件实现方案。主要内容包括:(1)CAN总线采用差分信号传输,实际应用中需共地连接以确保稳定性;(2)通过对比UART、I2C、SPI等通信协议,突出CAN在多节点、高可靠性和长距离传输方面的优势;(3)详细解析高速CAN与低速CAN的硬件设计差异,包括终端电阻配置(高速CAN需120Ω匹配电阻,低速CAN采用2.2kΩ偏置电
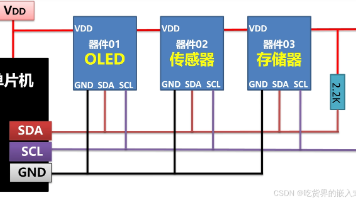
I2C总线通信协议解析 I2C总线通信协议是一种基于两根信号线(SDA数据线和SCL时钟线)的串行通信标准,具有以下核心特点: 硬件连接要点 所有设备共享SDA和SCL线,并共地连接 必须为两条信号线添加外部上拉电阻(典型值2.2kΩ-10kΩ) 设备地址通过硬件引脚配置,避免地址冲突 通信时序关键 数据传输原理: SCL高电平时采样数据,低电平时切换数据 SDA高电平为"1"
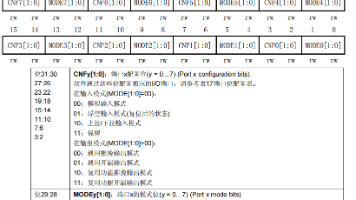
每个GPIO端口(A-E)由7个寄存器控制,每组寄存器控制特定功能。下面按寄存器类型详细对比标准库和寄存器操作。:控制引脚工作模式(输入/输出/复用)和输出速度:读取引脚当前电平状态(只读):低16位对应引脚电平(0/1)注意:该寄存器只能以的形式读出:控制输出电平 +:低16位控制输出电平:原子操作输出电平(避免ODR直接操作冲突):快速清除输出电平(专用于低电平输出):低16位控制清零操作:锁