




- @weixin_46697509
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
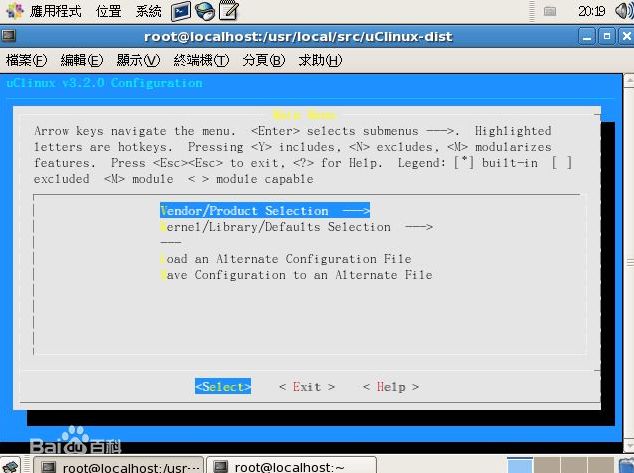
嵌入式操作系统与通用的操作相比较主要特点在于: 1.小内核,稳定可靠。 2.需要可装卸、可裁剪,以便能灵活应对各种不同的硬件平台。 3.面向应用,强实时性,可用于各种设备控制当中。 国际上常见的嵌入式操作系统大约有40种左右如:Linux、uClinux、WinCE、PalmOS、Symbian、eCos、uCOS-II、VxWorks、pSOS、Nucleus、ThreadX 、Rtem
因为单片机的工程师一般有着比较熟悉的硬件知识,只需要学一些结构和算法,深入学习一下Linux/其他嵌入式操作系统的源代码和架构,学习一下Linux平台下驱动开发的核心技术。对于常用查找,排序算法的了解和使用(静态查找:(1)顺序查找(线性查找)(2)折半查找(二分或对分查找)(3)分块查找(索引顺序查找)动态查找:(1)二叉排序树(2)平衡二叉树,,二叉排序树,二叉查找树,树的应用),图的存储方式

2. 定位与导航算法:用于机器人在环境中定位自身位置并规划路径的算法,如SLAM(同时定位与地图构建)算法、路径规划算法等。5. 协作与协调算法:用于多个机器人之间的协作和协调的算法,如分布式任务分配、合作路径规划等。3. 运动控制算法:用于机器人运动控制和姿态调整的算法,如PID控制算法、运动规划算法等。1. 感知算法:用于机器人对环境进行感知和理解的算法,如图像处理、目标检测、目标跟踪等。这些

2. 定位与导航算法:用于机器人在环境中定位自身位置并规划路径的算法,如SLAM(同时定位与地图构建)算法、路径规划算法等。5. 协作与协调算法:用于多个机器人之间的协作和协调的算法,如分布式任务分配、合作路径规划等。3. 运动控制算法:用于机器人运动控制和姿态调整的算法,如PID控制算法、运动规划算法等。1. 感知算法:用于机器人对环境进行感知和理解的算法,如图像处理、目标检测、目标跟踪等。这些
嵌入式操作系统与通用的操作相比较主要特点在于: 1.小内核,稳定可靠。 2.需要可装卸、可裁剪,以便能灵活应对各种不同的硬件平台。 3.面向应用,强实时性,可用于各种设备控制当中。 国际上常见的嵌入式操作系统大约有40种左右如:Linux、uClinux、WinCE、PalmOS、Symbian、eCos、uCOS-II、VxWorks、pSOS、Nucleus、ThreadX 、Rtem
2. 定位与导航算法:用于机器人在环境中定位自身位置并规划路径的算法,如SLAM(同时定位与地图构建)算法、路径规划算法等。5. 协作与协调算法:用于多个机器人之间的协作和协调的算法,如分布式任务分配、合作路径规划等。3. 运动控制算法:用于机器人运动控制和姿态调整的算法,如PID控制算法、运动规划算法等。1. 感知算法:用于机器人对环境进行感知和理解的算法,如图像处理、目标检测、目标跟踪等。这些
ROS概述机器人是一种高度复杂的系统性实现,机器人设计包含了机械结构设计、机械加工、硬件设计、嵌入式软件设计、上层软件设计等诸多模块,是各种硬件与软件的有机结合,甚至可以说机器人系统是当今工业体系的集大成者。机器人体系是相当庞大的,其复杂度之高,以至于没有任何个人、组织甚至公司能够独立完成系统性的机器人研发生产任务。在此大背景下,便诞生了ROS。ROS出生于2007年,ROS的出现解决了机器人各个

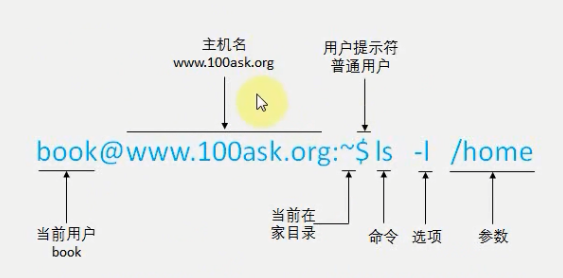
常用命令与示例一、文件基本操作命令1. ls命令2. pwd命令3. mkdir命令4. cd命令5. touch命令6. cp命令7. mv命令8. rmdir命令9. rm命令10. cat命令11 more和 less命令12. head命令13. tail命令二、用户、组管理命令1. groupadd命令2. useradd命令3. userdel命令4. groupdel命令5. pas
当外部主机可以上网时,且虚拟网络编辑器中设置为:是NAT模式,但Ubuntu仍然不能上网:虚拟机选项卡栏-----> 编辑--------> 虚拟网络编辑器 ---------> 选择恢复默认设置,点击确定即可!3、进入“系统配置”,选中“服务”,勾选左下角“隐藏所有Microsoft服务”,再点击“全部禁用”,点击“应用”。6、关闭“任务管理器”,返回“系统配置”界面下点击“确定”,依据提示重启

当外部主机可以上网时,且虚拟网络编辑器中设置为:是NAT模式,但Ubuntu仍然不能上网:虚拟机选项卡栏-----> 编辑--------> 虚拟网络编辑器 ---------> 选择恢复默认设置,点击确定即可!3、进入“系统配置”,选中“服务”,勾选左下角“隐藏所有Microsoft服务”,再点击“全部禁用”,点击“应用”。6、关闭“任务管理器”,返回“系统配置”界面下点击“确定”,依据提示重启
