




- @weixin_45429089
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
近两年,Vision-Language-Action(VLA)策略成了具身智能的中心范式——把感知、语言理解、控制统一进一个端到端模型。但纯反应式 VLA 在长时序推理、误差累积、物理鲁棒性上仍有明显短板。问题的根源不只是"动作预测能力不足",更是缺少一个显式的预测结构去预判"世界将如何在机器人行为下演化"。这正是"世界模型(World Model)"复兴的契机。但"世界模型"这个词在文献里被用得
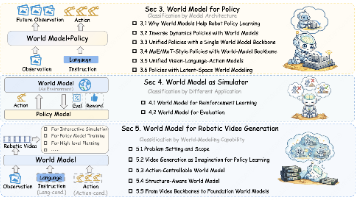
让机器人在非结构化的物理环境中感知、推理并行动,长期以来一直是具身智能(Embodied AI)研究的核心目标。近年来,这一领域逐渐汇聚到一个强有力的范式之上:视觉-语言-动作模型(Vision-Language-Action, VLA),即将预训练的视觉-语言骨干网络重新改造为通用的机器人策略。通过把动作生成形式化为"在互联网级视觉与语言表征之上的条件化 token 预测",VLA 模型展现出了
本文综述了纯视觉-语言-动作(VLA)模型的最新研究进展,系统梳理了从基础模型到具身智能的发展脉络。文章提出基于动作生成策略的四大范式分类法:自回归、扩散、强化和混合专用方法,并对每类方法的代表性工作、技术特点及优缺点进行了详细分析。同时涵盖了VLA研究所需的数据集、仿真平台、机器人硬件等关键支撑要素,并讨论了当前面临的五大挑战和未来四大发展方向。该综述为研究者提供了VLA领域的全景式技术路线图,
大语言模型综述
OpenPCDet个人学习记录项目地址数据处理kitti_dataset.py的理解项目地址Github地址: https://github.com/open-mmlab/OpenPCDet史少帅博士本人对OpenPCDet的描述可以参看这篇文章:OpenPCDet: Open-MMLab 面向LiDAR点云表征的3D目标检测代码库数据处理kitti_dataset.py的理解...
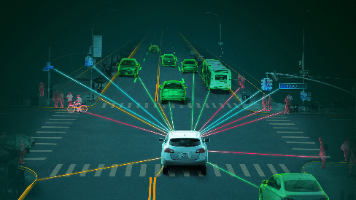
本文综述了深度学习在自动驾驶中的关键应用,系统梳理了感知、定位、决策与控制四大模块的技术进展。文章首先介绍了SAE自动驾驶分级标准,指出当前L2向L5演进面临的技术与伦理挑战。重点分析了目标检测算法(如DETR、Swin Transformer和SAM)在复杂环境下的性能优化,探讨了3D目标表示对导航安全的重要性。研究强调,实现高阶自动驾驶需要算法突破与系统级解决方案的协同,包括传感器融合、计算效
Straight-Through Estimator (STE)Gumbel-SoftmaxReinforceConcrete / Relaxed SoftmaxContinuous RelaxationsTemperature AnnealingDifferentiable ArgMax

本文综述了深度学习在自动驾驶中的关键应用,系统梳理了感知、定位、决策与控制四大模块的技术进展。文章首先介绍了SAE自动驾驶分级标准,指出当前L2向L5演进面临的技术与伦理挑战。重点分析了目标检测算法(如DETR、Swin Transformer和SAM)在复杂环境下的性能优化,探讨了3D目标表示对导航安全的重要性。研究强调,实现高阶自动驾驶需要算法突破与系统级解决方案的协同,包括传感器融合、计算效
[Repose]gpustat : Linux下面监控GPU状态转载自:gpustat
Straight-Through Estimator (STE)Gumbel-SoftmaxReinforceConcrete / Relaxed SoftmaxContinuous RelaxationsTemperature AnnealingDifferentiable ArgMax