- @weixin_44718107
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
最近师兄建议我在放论文实验视频的时候可以同时播放对应数据随时间变化的动画视频。查阅全网,发现好像还没有人对如何用matlab做这件事情有完整的总结。这里,我简单地总结一下我的经验。
adaptive MPC NMPC控制倒立摆

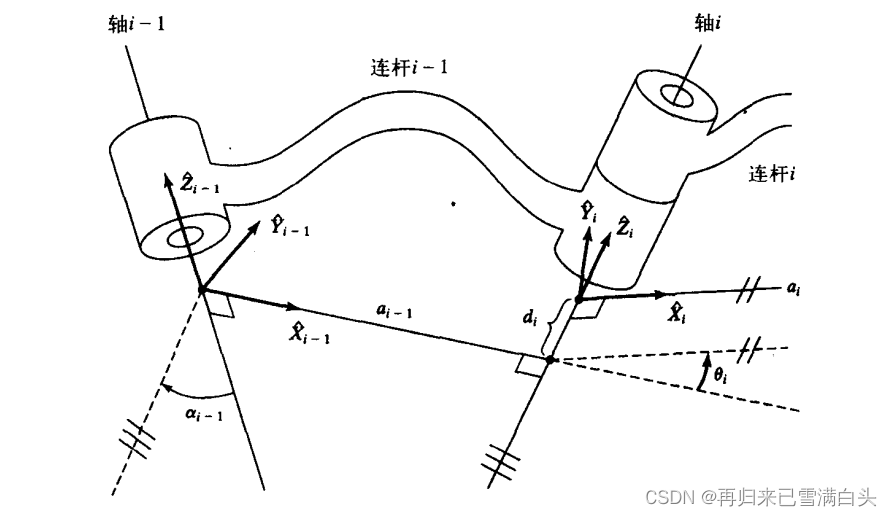
一般而言,机器人均采用仅有一个自由度的连杆,在极少数情况下,会采用自由度为n的连杆,在此时,可以将之视为n个自由度为1,长度为0的连杆相连接而成,所以以下针对自由度为1的连杆的讨论可以在不失一般性的前提下完成。首先从操作臂的基座开始,将其命名为连杆0,第一个可动连杆为连杆1,最后一个可动连杆为连杆n。为了使末端执行器顺利到达位置,机械臂一般需要最少6个关节(这是显然的,因为空间中的一个位置描述需要
因而我们引入模型预测控制(Model PredictiveControl)的概念,对于一般的离散化系统(因为实际计算机实现的控制系统都是离散的系统,连续系统离散化的方法在此不述)。在k时刻,我们可以测量或估计出系统的当前状态y(k),再通过计算得到的u(k),u(k+1),u(k+2)...u(k+j)得到系统未来状态的估计值y(k+1),y(k+2)...y(k+j);我们将预测估计的部分称为预

对于机器人而言,求解雅可比的矩阵可以通过机器人各个关节的速度求得末端的速度与角速度,而求解逆运动学时,经常会出现已知末端机器人末端速度,求机器人各个关节速度的情况。对于一个矩阵Am×n和矩阵Bn×mABA=A则称B是A的广义逆矩阵。在机器人学之中,一般使用矩阵的左逆或者右逆,若A是满秩,则可以使用它的左逆或右逆矩阵。若m>n,则使用左逆矩阵,若n>mAleft−1=(ATA)−1ATArig
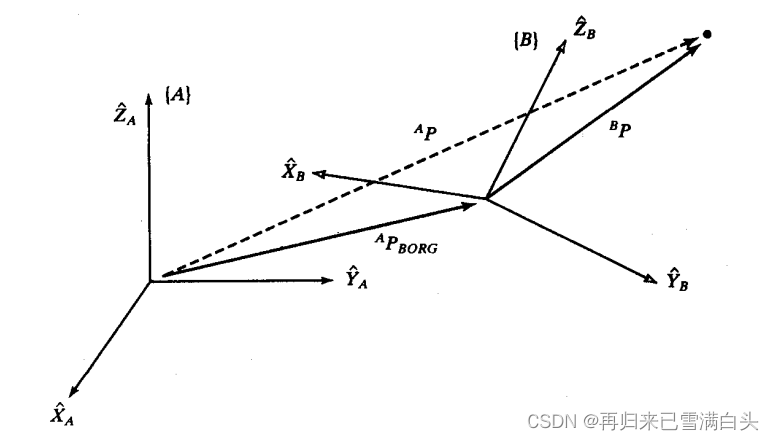
给出齐次变换矩阵的三个定义:1.它是坐标系的描述。BAT^{A}_{B}TBAT表示相对于坐标系{A}的坐标系{B}。特别的,BAR^{A}_BRBAR(纯旋转矩阵)的各列是B坐标系主轴上的单位矢量(在A坐标系下的表示),APBORGAPBORG只起到确定B的原点的作用。2.它是变换映射,BAT^{A}_{B}TBAT可以将矢量从B坐标系变换到A坐标系。3.它是变换算子。