




- @weixin_43935696
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
摘要:WSL2 Ubuntu中claude命令失效问题排查发现,实际二进制文件存在于node_modules深层目录但未正确链接到PATH。通过手动创建软链接到Node.js的bin目录(~/.nvm/versions/node/v20.20.2/bin/)并确保该目录在PATH中,成功修复问题。根本原因是npm全局链接损坏导致可执行文件未被暴露,同时PATH环境变量混乱(含Windows路径干扰
目录1 近似线性法2 罚函数法3 MATLAB函数求解方法4 LINGO软件求解方法5 课后习题1 近似线性法近似线性法:在一个小范围内展开2 罚函数法基本思想是通过构造罚函数把约束问题转化为一系列无约束最优化问题,进而用无约束最优化方法去求解。这类方法为序列无约束最小化方法。简称为SUMT。分为内点法和外点法两种。罚函数法:将约束条件放入目标函数(1)SUMT外点法原问题化为其中T(X,M)称为
目录1 登录校园网2 进入EI验证(1)进入验证首页(2)选择机构认证。(3)授权成功后自动返回界面(4)进入搜索页面(5)查看论文详细信息1 登录校园网校园网的认证,有VPN,校内网或者webVPN等等。在自己学校图书馆找到登入方式,登入认证连接即可。2 进入EI验证Engineering Village官网(1)进入验证首页(2)选择机构认证。如果先登录校园网的,一般会自动弹出学校的认证授权界
目录1 引言2 详解3 优缺点3.1 优点3.2 缺点4 应用领域5 面经5.1 第一部分5.2 第二部分1 引言Transformer中抛弃了传统的CNN和RNN,整个网络结构完全是由Attention机制组成。更准确地讲,Transformer主要由多头self-Attenion和Feed Forward Neural Network组成。一个基于Transformer的可训练的神经网络可以通
1 基本概念1.1 多项式和时间复杂度(1)多项式axn+bxn−1+cax^n+bx^{n-1}+caxn+bxn−1+c,形如这种形式的就被称为x的最高位为n的多项式。(1)时间复杂度定义为随着问题规模的增大,算法执行时间增长的快慢。它可以用来表示一个算法运行的时间效率。举个例子,冒泡排序的时间复杂度为O(n2)O(n^2)O(n2) ,取其最高次,可以看出,这是一个时间复杂度为多项式的表示方
深度学习工作站性能对比测试摘要 本次测试对比了基于ARM架构的ThinkStation PGX工作站与x86平台的RTX 4090系统在深度学习任务中的表现。测试结果显示:RTX 4090在计算性能上全面领先,矩阵乘法快2.76倍,卷积运算快3.33倍,训练速度快2.85倍,主要得益于其先进的Ada架构和高显存带宽。而PGX工作站则展现出显著的内存优势,显存容量达119.6GB(是4090的5倍)

1 引例引例(食谱问题)设有n种食物,各含m种营养素,第j种食物中第i种营养素的含量为an,n种食物价格分别为c1,c2,…,cn。请确定食谱中n种食物的数量x1,x2,…xn。要求在食谱中m种营养素的含量分别不低于b,b2,…,bn的情况下,使得总的费用最低。定义 :将目标函数和约束条件都是线性函数的数学规划问题称为线性规划问题(LP 问题)。MATLAB软件求解函数:linprog模型:min
目录1 统计建模简介(1)概念统计建模是指以计算机统计分析软件为工具,利用各种统计分析方法对批量数据建立统计模型和探索处理的过程,用于揭示数据背后的因素,诠释社会经济现象,或对经济和社会发展作出预测或判断。(2)应用随着计算机和网络技术的快速普及和广泛发展,我们面对着数据和信息爆炸的挑战,如何迅速有效地将数据提升为信息、知识和智能,是统计工作者面临的重要课题。而统计建模将统计方法、计算机技术完美结
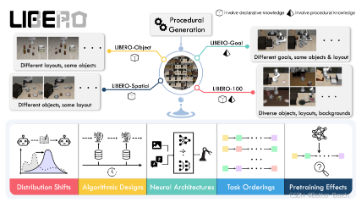
LIBERO是一个用于研究**多任务和终身机器人学习中知识迁移**的综合基准测试平台,LIBERO是基于robosuite框架构建的。它专注于机器人操作任务,这些任务需要两类知识:
基于Mujoco仿真平台robosuite采集的自定义数据集在单张RTX 4090上通过LoRA微调PI0模型的完整指南