
写文章




- @weixin_43850560
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
【知识总结系列】 - 计算机图形学基础知识
仿射变换(Affine Transformation)是图形学和计算机视觉领域中的一种线性变换,用于将一个二维或三维对象从一个位置、大小、方向映射到另一个位置、大小、方向,同时保持了原始对象的平行线性质和直线性质。仿射变换是一种非常基础且重要的几何变换,它可以表示为一个矩阵乘法,通常用于以下操作:平移(Translation):将对象沿着给定的方向和距离移动。旋转(Rotation):围绕一个中心
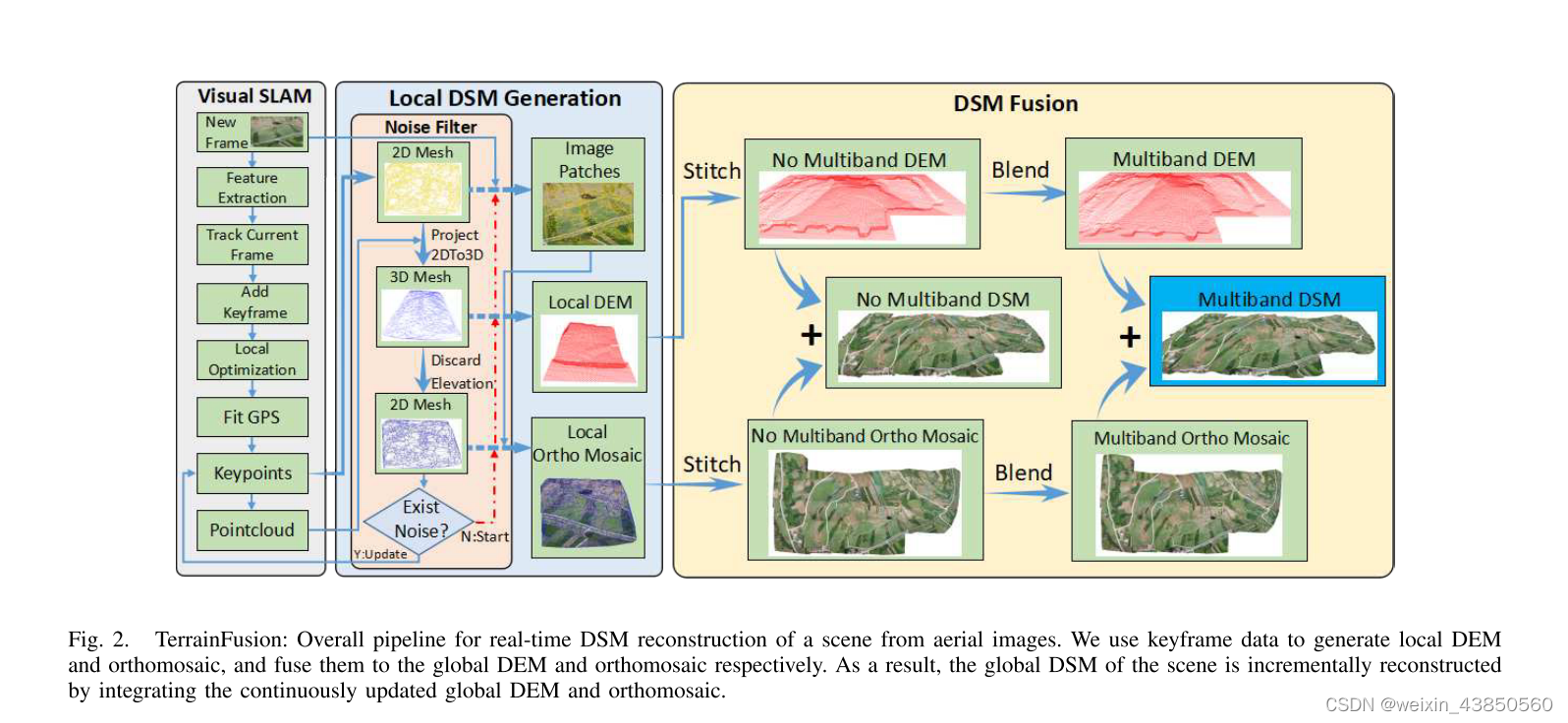
论文解读【无人机建图系列】 - 无人机实时重建DEM TerrainFusion:基于单目SLAM的实时数字表面模型重建
TerrainFusion:基于单眼SLAM的实时数字表面模型重建
【知识总结系列】- 世界模型
世界模型的作用在于构建真实的世界,具备真实世界的物理规则和约束,方便机器人可以在虚拟的世界进行训练和学习对齐人类行为,更重要的是可以低成本生产现实世界难以采集的数据。
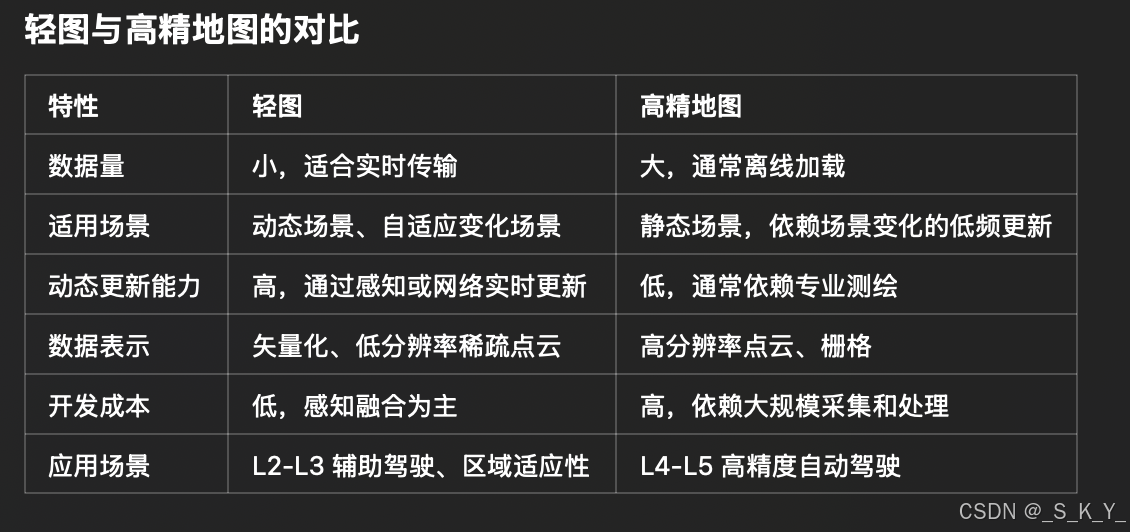
自动驾驶领域大模型、感知和定位建图技术应用的相关思考
你是否想过自动驾驶时代轻地图重感知SLAM是否还有用武之地?自动驾驶如何实现端到端?快来看看GPT如何回答吧
论文解读【3DGS系列】 - H3DGS:针对大尺度数据集实时渲染的分层3DGS
论文解读[3DGS系列] -H3DGS:针对大尺度数据集实时渲染的分层3DGS( A Hierarchical 3D Gaussian Representation for Real-Time Rendering of Very Large Datasets)
【知识总结系列】 - SLAM/三维重建相关知识点总结 && 面经
SLAM 相关知识点总结 && 面经

到底了