




- @weixin_43586667
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
一、 传统方式计算RSA1.公私钥计算(1) 计算 n = p x q ;(2) 计算Φ(n)= (p-1) x (q-1);(3) 选择 e ,且e与Φ(n)互素 ;(4) 确定d x e= 1 mod Φ(n);(5) 确定公钥 PU = {n , d}, 私钥 PR = {n,e}2.加解密明文M ;加密Y= M^e mod n;解密 M = Y^d mod n;二、 中国剩余定理简介p和q
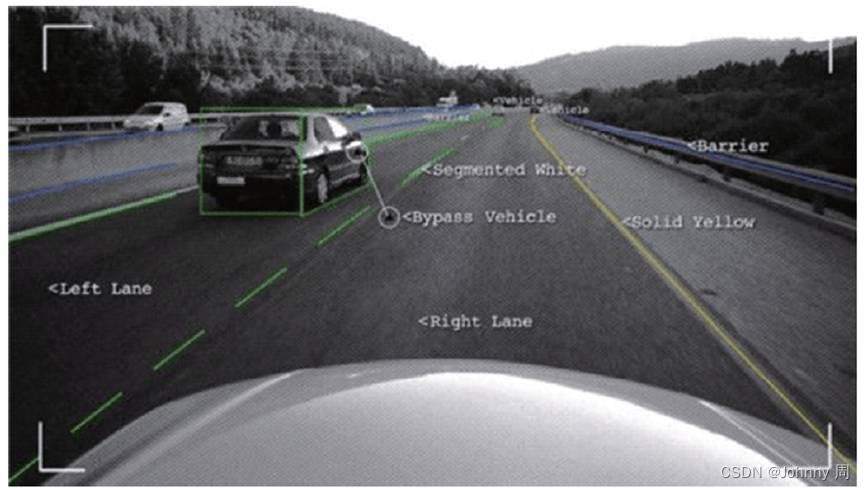
双目摄像头是通过对两幅图像视差的计算,直接对前方景物(图像所涉及的范围)进行距离测量,因此无须判断前方出现的物体是什么类型的障碍物,不用像单目摄像头那样建立并维护庞大的样本特征数据库。依靠两个平行布置的摄像头产生的视差,找到同一物体所有的点,依赖精确的三角测距,就能够算出摄像头与前方障碍物的距离,实现更高的识别精度和更远的探测范围。在140km/h的车速下,汽车每秒要移动40m的距离,为避免两次图
借助LiDAR本身的特性可以很好的探测反射障碍物的远近,大小,甚至表面形状,有利于障碍物检测准确性的提高,而且在算法方面比起机器视觉算法来也比较简单,更适合无人车的需求,下图为激光雷达生成的点云图。最后,将初始位置信息,激光雷达提取的特征跟高精地图的特征信息进行匹配,从而获取一个准确的定位。利用以下简化的概率模型:已知t0时刻的GNSS信息,t0时刻的点云信息,以及t1时刻无人车可能位于的3个位置
嵌入式系统架构
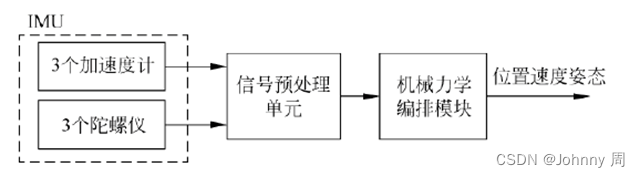
(f)量化误差,这在所有数字系统中是固有的,由于它可能存在于标准化环境中,当输入不变时它的值可能是变换的。该系统通过加速度计测量车辆在惯性参考系中的加速度,通过陀螺仪测量载体的旋转运动,可以进行惯性坐标系到导航坐标系的转换,将角速度相对时间进行积分,结合车辆的初始运动状态(速度,位置),就能推算出车辆的位置和姿态信息。牛顿第二定律在INS中也有重要的作用,简单来说,牛顿第二定律说明了加速度的大小与
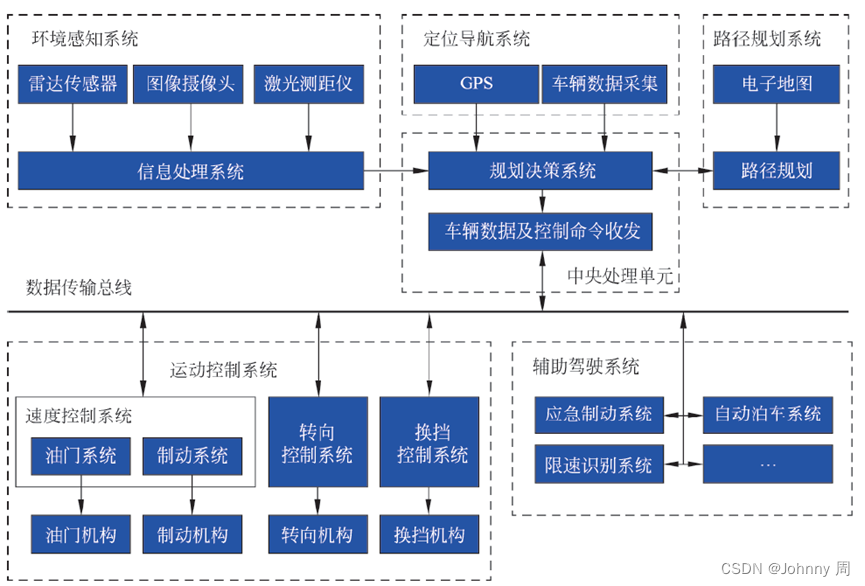
自动驾驶汽车技术架构较为复杂,涉及了多领域的交叉互容,例如汽车、交通、通信等,基于自动驾驶相关的软硬件、辅助开发工具、行业标准等各方面关键问题,自动驾驶汽车关键技术可分文以下几个部分。
即在有限的条件下实现自动控制,例如,在预先设定的路段(例如高速、低流量的城市路段),自动驾驶系统可以独立负责整个车辆的控制,然而,在特殊紧急情况下,驾驶员仍然需要接管,但系统需为驾驶员预留足够的警告时间。L3级别将解放驾驶员,无须随时监控道路状况,将驾驶安全主控权交给车辆自动驾驶系统。与SAE自动驾驶分级基本保持对应,SAE-China将自动驾驶汽车分为DA、PA、CA、HA、FA5个等级,考虑了
一.服务概述此服务的目的是为客户提供一种证明其身份的方法,允许其访问数据和/或诊断服务,这些数据和/或诊断服务由于安全、排放或安全等原因而受到限制。 用于将例程或数据下载/上传到服务器以及从服务器读取特定内存位置的诊断服务可能需要身份验证。 不正确的程序或下载到服务器的数据可能会潜在地损害电子设备或其他车辆部件,或危及车辆的排放、安全或安全标准的遵守。 另一方面,当从服务器检索数据时,可能会违反数
一.椭圆曲线加密算法简称ECC,是基于椭圆曲线数学理论实现的一种非对称加密算法。相比RSA,ECC优势是可以使用更短的密钥,来实现与RSA相当或更高的安全,RSA加密算法也是一种非对称加密算法,在公开密钥加密和电子商业中RSA被广泛使用。据研究,160位ECC加密安全性相当于1024位RSA加密,210位ECC加密安全性相当于2048位RSA加密(有待考证)二.什么是椭圆曲线Wolfram Mat