




- @weixin_43409627
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
目录背景YOLOv1YOLOv1简介YOLOv1训练YOLOv1测试YOLOv2关于YOLOv2 边框预测计算:YOLOv2所带来的改变YOLOv3结构代码utils.pyconvert.pyvoc_annotation.pykmeans.py...
首先原理和cpu的实现我这里就不赘述了,大家可以移步此篇文章,讲的很详细,并且gpu的代码也是按照这篇的思路去做的,链接:图像处理之双线性插值法。下面直接贴代码:CPU端实现:void Resize(cv::Mat matDst1, cv::Mat matSrc) {uchar* dataDst = matDst1.data;int stepDst = matDst1.step;uchar* da
首先原理和cpu的实现我这里就不赘述了,大家可以移步此篇文章,讲的很详细,并且gpu的代码也是按照这篇的思路去做的,链接:图像处理之双线性插值法。下面直接贴代码:CPU端实现:void Resize(cv::Mat matDst1, cv::Mat matSrc) {uchar* dataDst = matDst1.data;int stepDst = matDst1.step;uchar* da
项目中要使用QGC,还要做一些更改,感觉Qgc源码很多,又是一个开源项目,对于qt开发项目经验不足的我们来说实在是一个不可多得学习资料,所以决定花一些时间对源码进行注释和解读,这样也能更好的利用到项目中去。
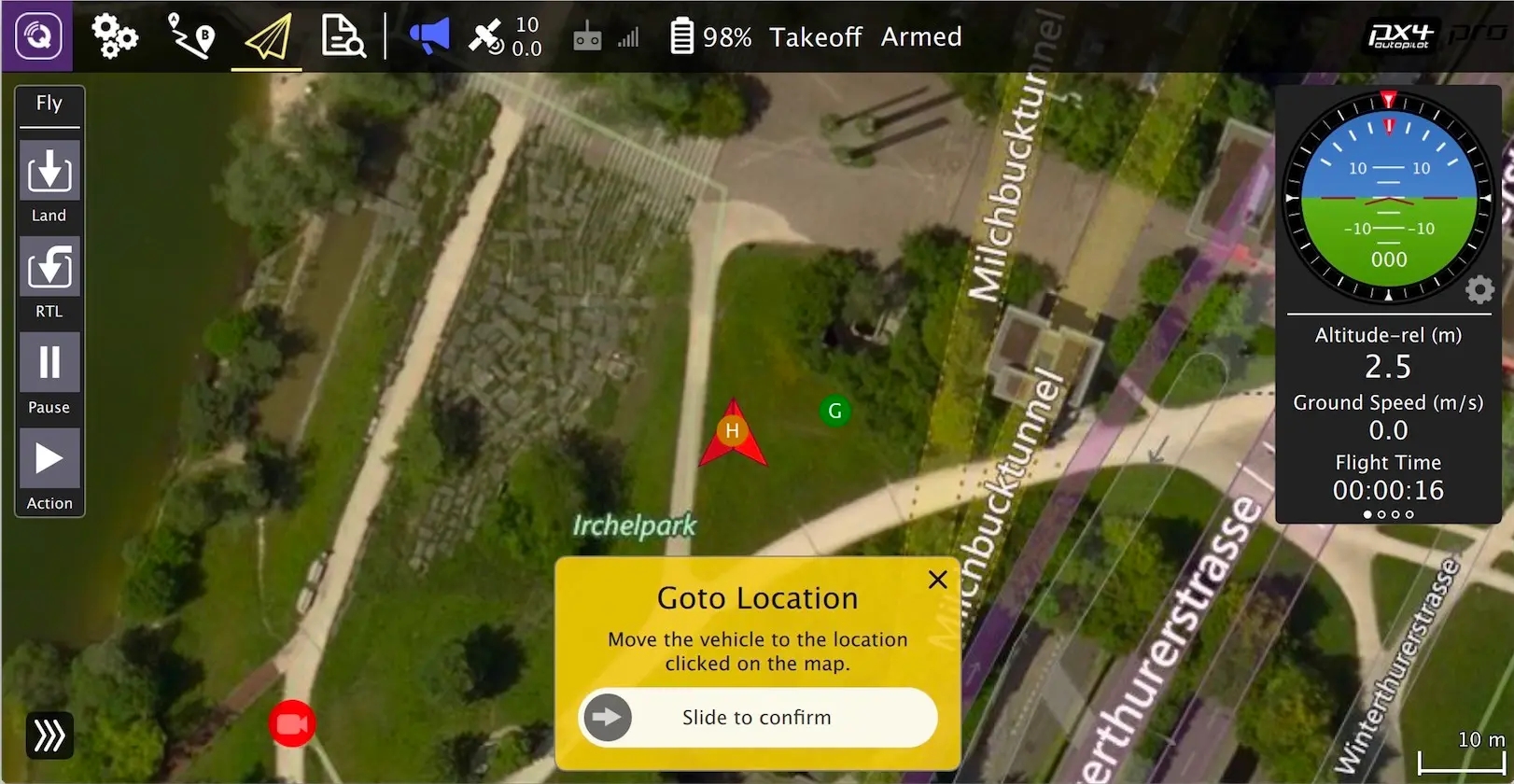
本篇文章讲解AirMap。
项目中要使用QGC,还要做一些更改,感觉Qgc源码很多,又是一个开源项目,对于qt开发项目经验不足的我们来说实在是一个不可多得学习资料,所以决定花一些时间对源码进行注释和解读
项目中要使用QGC,还要做一些更改,感觉Qgc源码很多,又是一个开源项目,对于qt开发项目经验不足的我们来说实在是一个不可多得学习资料,所以决定花一些时间对源码进行注释和解读,这样也能更好的利用到项目中去。
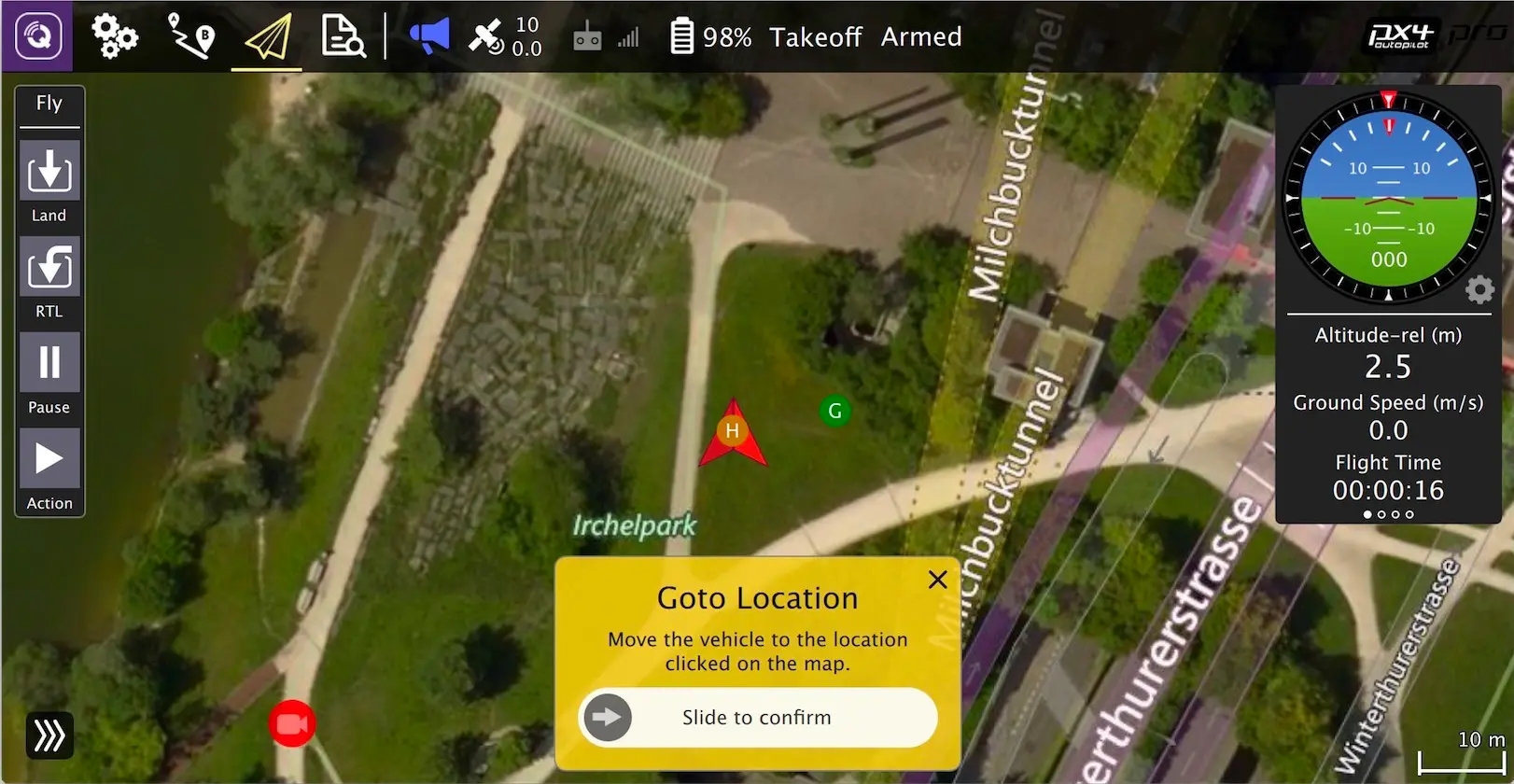
api文件夹下的代码分析
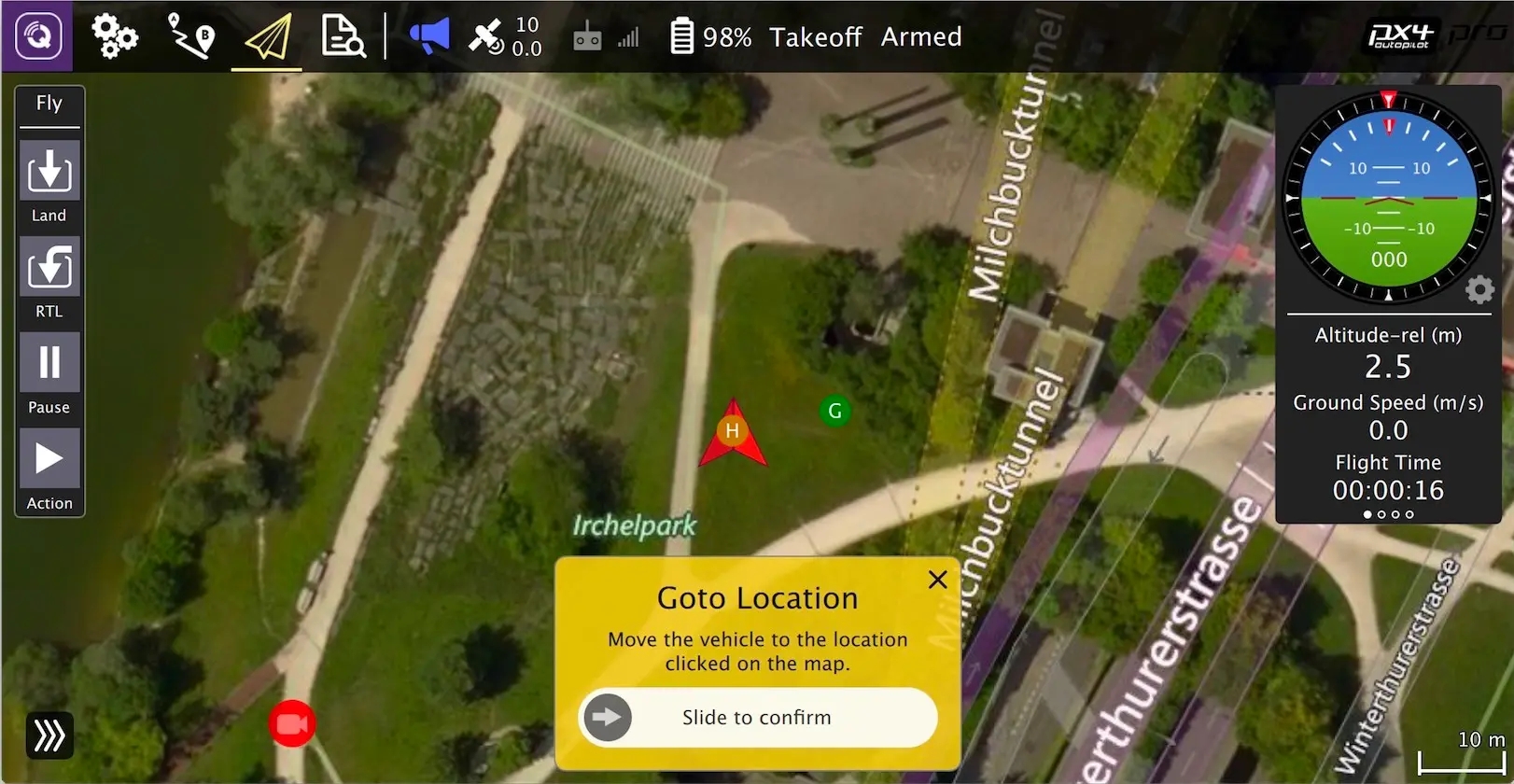
本篇介绍Camera文件夹下的内容,该文件夹下又三个类文件,分别是QGCCameraManager,QGCCameraIO,QGCCameraControl
隐马尔可夫模型,在语音识别,NLP,生物信息,模式识别等领域被实践证明是有效的算法。HMM是关于时序的概率模型,描述由一个隐藏的马尔科夫链生成不可观测的状态随机序列,再由各个状态生成观测随机序列的过程。HMM随机生成的状态随机序列,称为状态序列,每个状态序列生成一个观测,由此产生的观测随机序列,称为观测序列。HMM由初始概率分布pai,状态转移概率分布A以及观测概率分布B确定。lamd...