




- @weixin_42905141
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
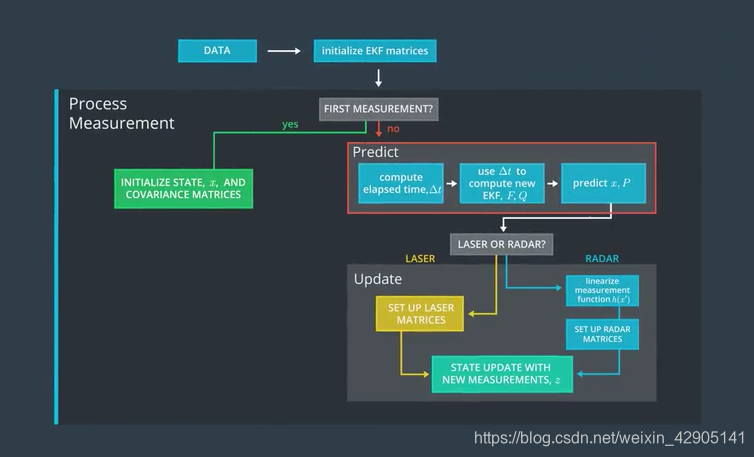
卡尔曼滤波算法图概述想象一下,你在一辆装有外部传感器的汽车里。汽车传感器可以检测到四处移动的物体:例如,传感器可能检测到自行车。卡尔曼滤波器算法将执行以下步骤:第一次测量 - 过滤器将接收自行车相对于汽车位置的初始测量值。这些测量将来自雷达或激光雷达传感器。初始化状态和协方差矩阵 - 过滤器将根据第一次测量初始化自行车的位置。然后汽车将在一段时间后接收另一个传感器测量值Δt\Delt...
参考:https://github.com/traveller59/kitti-object-eval-python,把相应的的依赖函数提取出来了,不需要单独安装second-1.5.1,spconv-1.0。也可以混合精度测试,通过修改config里的yaml参数,测试评估时要保证路径一一对应。可以看出int8精度损失比较严重,需要进一步做感知训练量化,接下来会利用英伟达提供的。编译代码,会得到

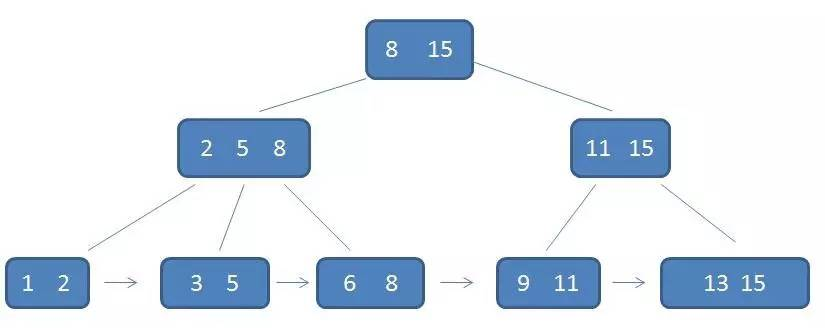
文章目录二叉树最大堆和最小堆二分查找二叉搜索树:平衡二叉树(AVL树):红黑树基于磁盘IO角度来看二叉树、B-tree树、B+树相关概念B-Tree与二叉查找树的对比B树B+树哈希表哈希表的实现构造哈希处理哈希冲突为什么哈希桶的长度和除留余数法的M为质数?跳表跳表的查找、插入和删除跳表和红黑树的对比树和图的区别二叉树二叉树定义n个结点的有限集合,该集合为空集,或者一个根节点和两棵互不相交的、分别称
文章目录RESTfulREST的指导原则资源资源方法REST和HTTP不一样!!ip地址、子网掩码、单机服务器最大并发的TCP连接数到底是多少带外数据和TCP紧急指针linux主机同步文件两台主机输入同一个url地址出现页面不同可能的原因。为啥网络要分层设计数据传输速率DNS域名解析的工作过程和原理一个机器的端口号上限,端口超过限制怎么办?单条记录高并发访问的优化UDP如何实现可靠传输TCP(UD

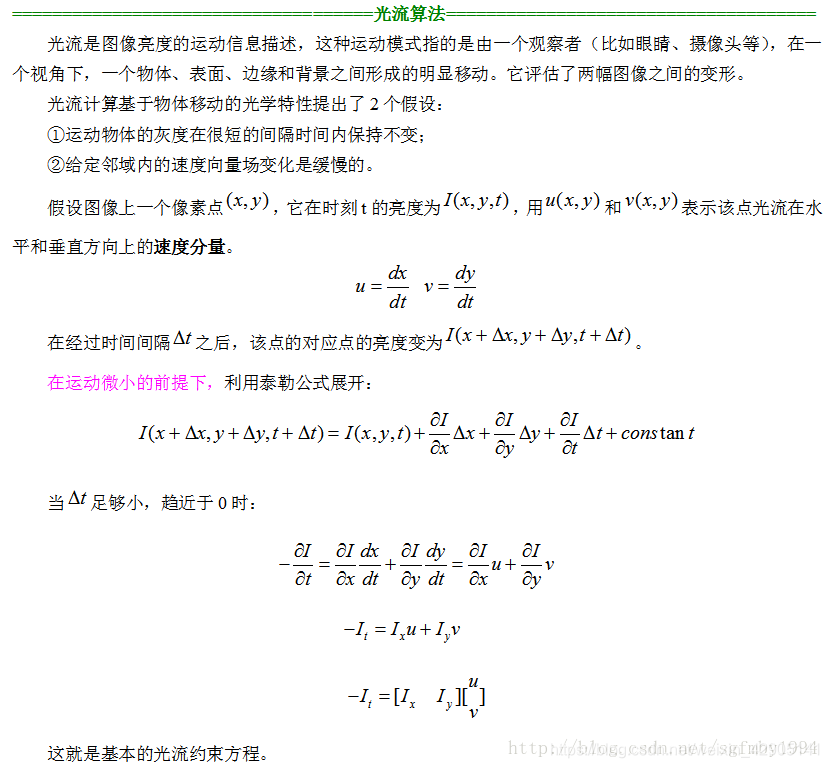
1. Optical Flow2. KLTKLT 算法本质上也基于光流的三个假设,不同于前述直接比较像素点灰度值的作法,KLT 比较像素点周围的窗口像素,来寻找最相似的像素点。参考:总结:光流–LK光流–基于金字塔分层的LK光流–中值流KLT 光流算法详解KLT角点跟踪算法(LK)学习(一)——算法原理...
文章目录RESTfulREST的指导原则资源资源方法REST和HTTP不一样!!ip地址、子网掩码、单机服务器最大并发的TCP连接数到底是多少带外数据和TCP紧急指针linux主机同步文件两台主机输入同一个url地址出现页面不同可能的原因。为啥网络要分层设计数据传输速率DNS域名解析的工作过程和原理一个机器的端口号上限,端口超过限制怎么办?单条记录高并发访问的优化UDP如何实现可靠传输TCP(UD
重装了系统,装个typora看看,尽然收费了!!!下载链接: https://pan.baidu.com/s/1a7xIoVAhooGD3NGYVDJgbA 提取码: wew7安装tar xzvf Typora-linux-x64.tar.gzcd binsudo cp -ar Typora-linux-x64 /optcd /opt/Typora-linux-x64/#启动./Typora下面为

4.torch stack算子 onnx不支持,导出onnx计算图很,将stack和后续PointPillarScatter转换一起定义为ScatterBevPlugin算子,自定义onnx节点和自定义TensorRT算子来实现。2.torch_scatter的scatter_mean和scatter_max onnx不支持,人为自定义onnx节点,后续并自定义tensorRT的scatter_m
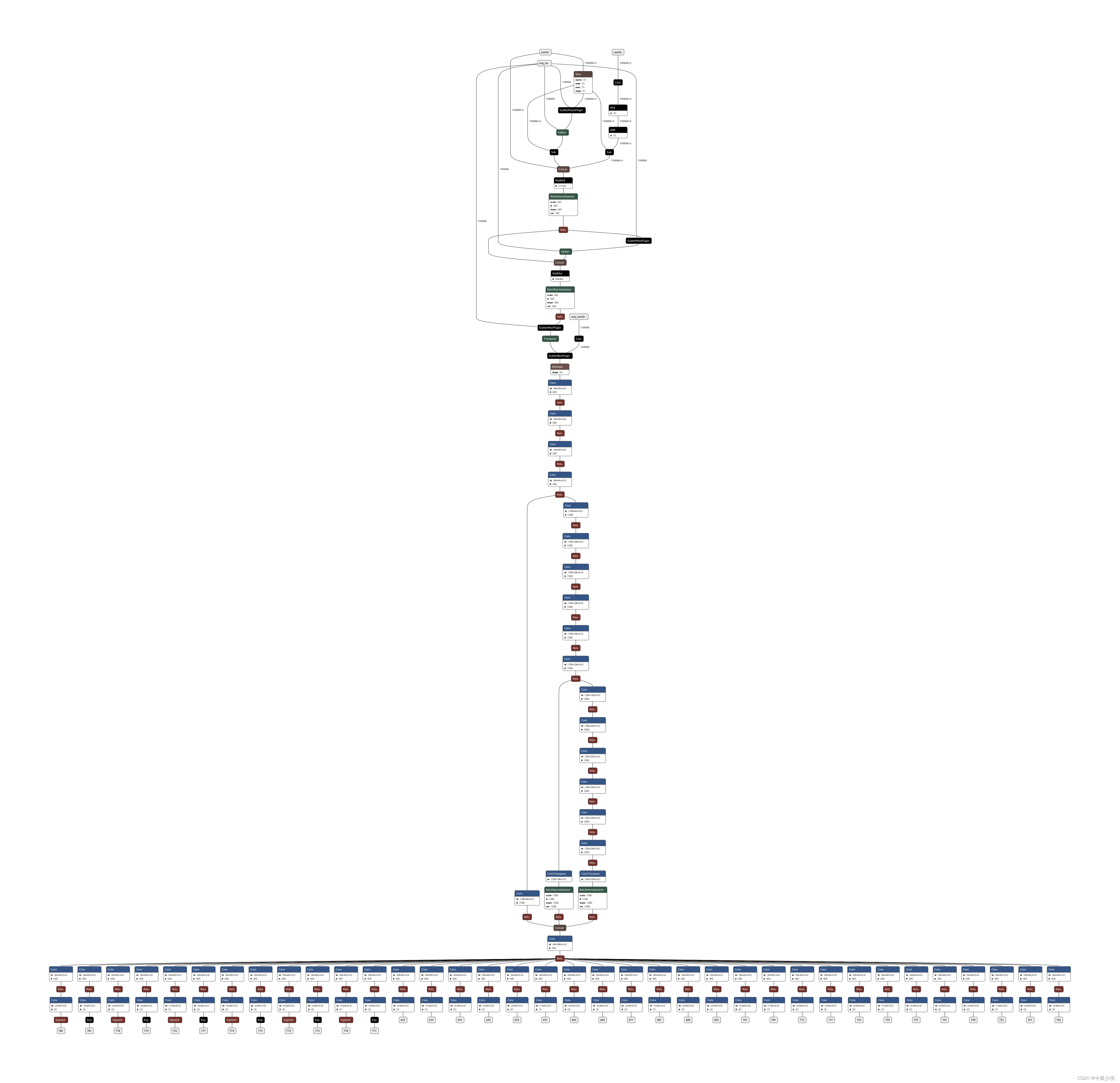
在torch和onnx精度对齐过程中发现,scatterND reshape输出值,有部分为nan,影响后续计算,决定认为将值为nan替换为0,可以在onnx图中看出多了isnan和where节点。本文转的onnx是静态的,也可以将voxel个数改为动态输入。
今天我们将尝试了解如何使我们的模型在推理上更快一点。使用 Batch Normalization 作为提高泛化能力的一种方式浪费了大量的网络。但是在推理过程中,批量归一化被关闭,而是使用近似的每通道均值和方差。很酷的是,我们可以通过 1x1 卷积实现相同的行为。更好的是,我们可以将它与前面的卷积合并。