




- @weixin_38184628
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
如下代码,有一个基类 Base,Derived1,Derived2,Derived3 3 个子类继承了基类 Base,分别是 private 继承,protected 继承,public 继承。在 main 函数里,分别使用 new 来创建 3 个子类,将 3 个子类指针赋值给 Base 指针,private 和 protected 继承的时候,子类指针无法赋值给父类指针。private 继承或者

假如A发布的多播消息,那么B和C都会收到,如果B和A之间有相同topic的writer和reader,也就是说B和A是可以通信的,那么B就会向A发送单播消息,进行后续的协商,后边的协商过程均通过单播来实现。participantId的分配如下代码所示,同一个进程的同一个domain内,participantId都是从0开始的,也就是说participantId并不是domain内唯一的,而是dom

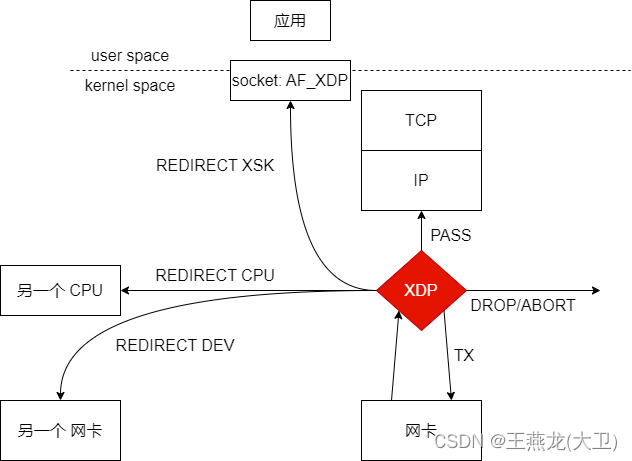
xdp 全称 eXpress Data Path,是 linux ebpf 中的一个功能。ebpf 在内核中预留了一些插入点,用户可以在这些插入点插入自己的处理逻辑,当数据路过插入点时可以做一些预期的处理,具体实现方式如下:① 用户编写数据处理代码,也就是对于路过这个插入点的数据想做什么处理② 将代码编译③ 将编译好的目标文件安装到插入点安装之后,数据路过插入点时便会被安装的代码处理。插入点的处理
僵尸态是 linux 进程的一种状态,用 Z (zombie) 表示。处于 Z 状态的进程已经不在工作,进程的资源(内存,打开的文件) 都已经释放,只保留 struct task_struct 一个空壳子,用僵尸来表示这个状态非常形象。僵尸进程不能被信号杀死(因为僵尸进程已经死了,当然也不能响应信号),只能被父进程回收。进程处于僵尸态时保存的信息非常少,其中包括进程号,退出码,退出码是比较重要的,
