




- @weixin_36670529
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
要成功地使用深度学习算法,仅仅知道存在哪些算法和解释它们为何有效的原理是不够的。一个优秀的机器学习实践者还需知道如何针对具体应用挑选一个合适的算法以及如何监控,并根据实验反馈改进机器学习系统。在机器学习系统的日常开发中,实践者需要决定是否收集更多的数据、增加或减少模型容量、添加或删除正则化项、改进模型的优化、改进模型的近似推断或调试模型的软件实现。尝试这些操作都需要大量时间,因此确定正确的做法,而
在创建代码仓库之前需要有github相关的账号,登录到github的官网中,点击sign in2、输入github账号和密码,然后点击sign in3可以点击右下角的“New repository”的按钮。4需要给仓库设置一个仓库的昵称,已区别的项目,在repository name填入仓库的昵称,如果是代码开源的默认选中pubic的选项,点击create repository即可5、这样一个项目
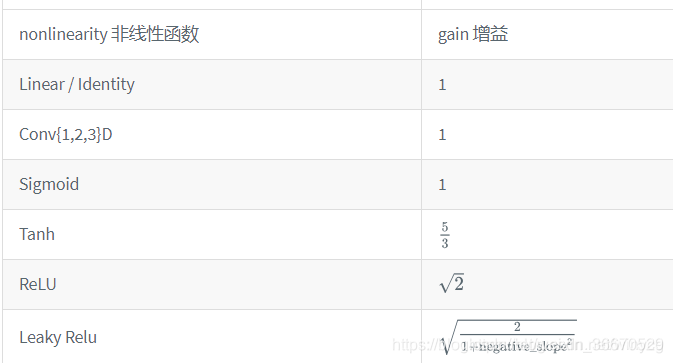
函数的增益值torch.nn.init.calculate_gain(nonlinearity, param=None)提供了对非线性函数增益值的计算。增益值gain是一个比例值,来调控输入数量级和输出数量级之间的关系。fan_in和fan_outpytorch计算fan_in和fan_out的源码def _calculate_fan_in_and_fan_out(ten...
1、3D Object Detection for Autonomous Driving: A Survey自动驾驶被认为是保护人类免遭严重车祸的最有前途的方法之一。 为此,三维目标检测是感知系统的核心基础,特别是在路径规划、运动预测、避碰等方面。 一般来说,立体或单目图像中相应的三维点云已经是三维目标检测的标准布局,随着提供准确的深度信息,点云越来越普遍。 尽管已有的努力,点云上的3D目标检测仍
1. 问题如下图所示:2. 损失为nan的原因1. 学习率过大,导致当然还有其他原因,目前可以参考警惕!损失Loss为Nan或者超级大的原因3. 解决方式降低学习率
在计算机视觉领域,有一个方向是语义分割,一般是针对图像进行像素级分类。具体而言,语义图像分割就是将每个像素都标注上其对应的类别。由于所有的像素都要考虑到,因此语义图像分割任务也被视为是稠密预测的一种。在此,要区别一下实例分割(具体可参考著名的MaskRCNN模型),实例分割常常与目标检测系统相互结合,用于检测和分割场景中同一对象的多个实例。基于深度学习的语义分割方法:用卷积神经网络分类...
Zipf分布:Zipf分布是一种符合长尾的分布:就是指尾巴很长的分布。那么尾巴很长很厚的分布有什么特殊的呢?有两方面:一方面,这种分布会使得你的采样不准,估值不准,因为尾部占了很大部分。另一方面,尾部的数据少,人们对它的了解就少,那么如果它是有害的,那么它的破坏力就非常大,因为人们对它的预防措施和经验比较少。也要所谓的二八法则。............
目录1、会议文章1、ICCV2、ECCV3、CVPR4、ICML5、NIPS6、ICLR7、Colt2、arxiv及其使用方法1、什么是arxiv-sanity2、arxiv-sanity的基本功能1、便捷的预览2、感兴趣相关度排序3、个人图书馆4、感兴趣推荐系统5、看看大家都在看什么6、网站代码开源3、期刊论文1、会议文...
一、图像识别问题简介与经典数据集视觉是人类认识世界非常重要的一种知觉。对于人类来说,通过识别手写体数字、识别图片中的物体或者是找出图片中人脸的轮廓都是非常简单的任务。然而对于计算机而言,让计算机识别图片中的内容就不是一件容易的事情了。图像识别问题希望借助计算机程序来处理、分析和理解图片中的内容,使得计算机可以从图片中自动识别各种不同模式的目标和对象。图像识别作为人工智能的一个重要领域,在最近几..
Xavier Initialization早期的参数初始化方法普遍是将数据和参数normalize为高斯分布(均值0方差1),但随着神经网络深度的增加,这方法并不能解决梯度消失问题。Xavier初始化的作者,Xavier Glorot,在Understanding the difficulty of training ......