




- @tostq
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
强化学习,Reinforcement Learning- An introduction,有限马尔可夫决策过程MDP,Bellman equation,Markov Decision Processes
Reinforcement Learning- An introduction的阅读笔记,强化学习,多臂老虎机,Thompson sampling,Gradient algorithms,UCB(Upper-Confidence-Bound),ε-greedy
基于强化学习预算约束出价问题的主要挑战在于如何精细地调整出价系数,以在满足客户预算约束的前提下最大化目标价值。传统的做法是通过线性规划求解预算约束出价问题,本文介绍一种基于强化学习的预算约束出价策略。该策略采用model-free Online DQN方式,通过一个拍卖系统仿真平台进行决策网络的训练和动作探索。

【机器学习算法笔记】5. 自组织映射SOM自组织映射是一类非监督学习算法自组织原则:1、自增强:如果两个神经元是同时激活的,则突触强度会选择性地增强;如果是异步激活的,突触强度会减弱2、竞争原则:可用资源的局限使得最强健增长的突触是以其他神经元作为代价的3、协作:在神经元级别中,对突触权值的修改趋于互相合作。4、结构化信息:在一个输入信号中存在的潜在次序和结构代表了冗余信息,其通过自组织
【机器学习算法笔记】3. 核方法和径向基(RBF网络)在涉及非线性可分模式分类中,多层感知器是通过神经元的非线性来达到的,这个非线性主要是通过使用Sigmoid函数来获得的。这一节介绍另一种通过混合方式来解决非线性可分模式问题:1、将给定非线性集合转换为线性集合2、通过最小二乘估计来解决线性分类问题。这个两段方法被称为核方法。3.1 核方法核方法的原理(模式可分性的Cover定理):
卷积神经网络是深度学习的基础,但是学习CNN却不是那么简单,虽然网络上关于CNN的相关代码很多,比较经典的是tiny_cnn(C++)、DeepLearnToolbox(Matlab)等等,但通过C语言来编写CNN的却比较少,本人因为想在多核DSP下运行CNN,所以便尝试通过C语言来编写,主要参考的代码是DeepLearnToolbox的内容,DeepLearnToolbox是用Matlab脚本编
强化学习,Reinforcement Learning- An introduction,有限马尔可夫决策过程MDP,Bellman equation,Markov Decision Processes
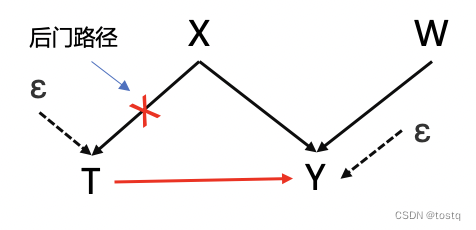
因果诊断,因果分析,DML,前门路径,后门路径,backdoor,frootdoor,Double Machine Learning,do算子,causal machine learning,CATE,ATE,混杂因子
原创文章转载请注册来源http://blog.csdn.net/tostq EMCV即Embedded Computer Vision Library,是一个可在TI DM64x系列DSP上运行的计算机视觉库。其提供了跟OpenCV完全一致的函数接口(包括IplImage, CvMat,CvSeq等基本数据结构),通过EMCV,可以轻松的将OpenCV算法移植
【机器学习算法笔记】1. 回归器模型回归算法是试图采用对误差的衡量来探索变量之间的关系的一类算法。回归算法是统计机器学习的利器。常见的回归算法包括:最小二乘法(线性回归),逻辑回归,逐步式回归,多元自适应回归样条等。1.1 线性回归器所谓线性回归:对于一组输入值X=[x1,x2,…,xn],存在输出y,为了代表输入与输出的函数关系,假定输出估计线性回归器所要求的问题:一元线性回归