




- @suoxd123
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
VMware虚拟机安装或本机安装系统。
规则学习就是指通过样本学习一个明确的规则,用以对待分类样本进行分类,目标是产生一个能覆盖尽可能多的样本的规则集。规则常分为命题规则和一阶规则,命题规则指使用具体原子命题和逻辑关系组合成的简单陈述句,一阶规则是由可以描述属性的原子公式,从描述来看命题规则属于一阶规则的特殊情况
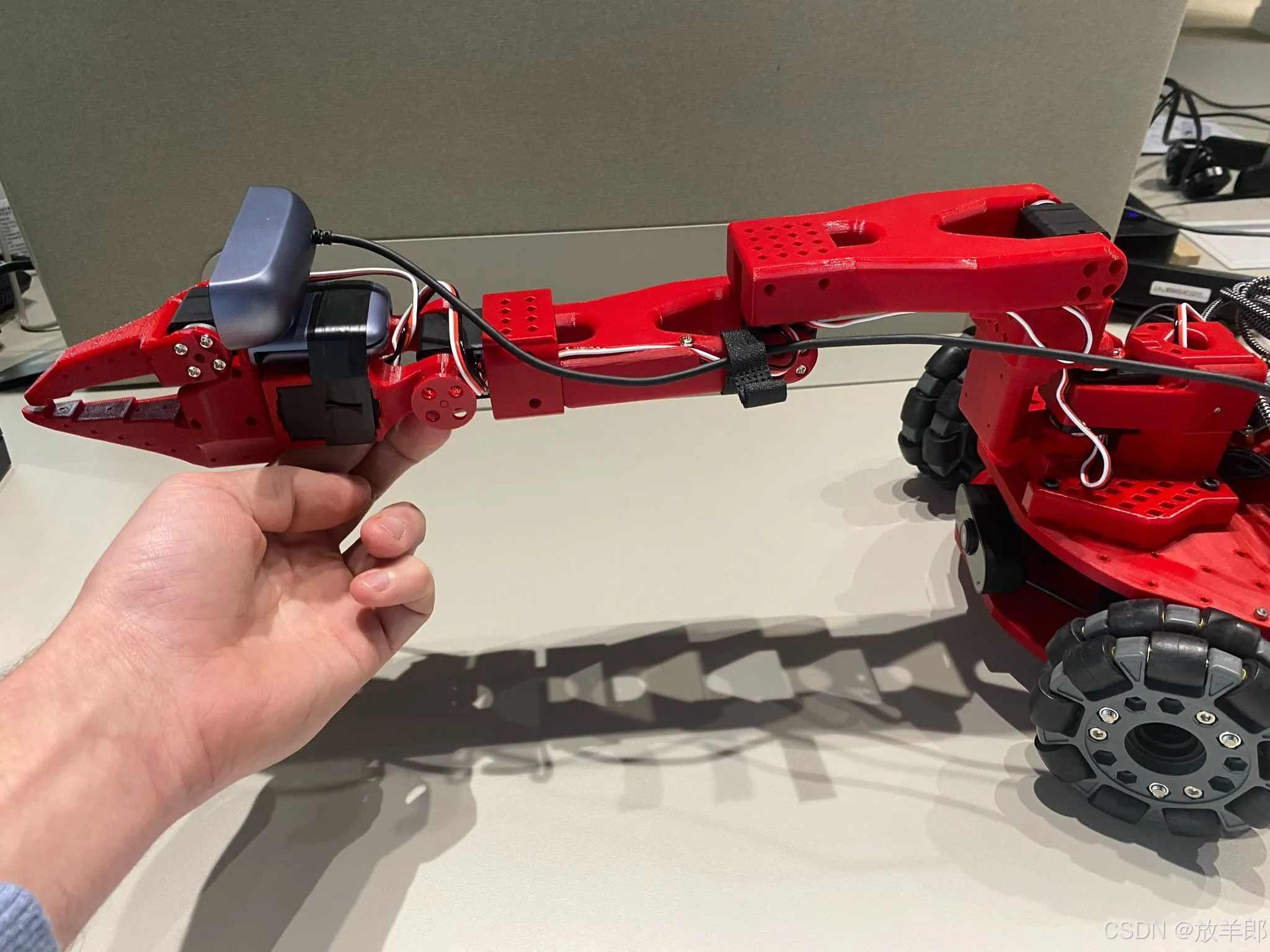
在连接了机械臂的电脑上执行下面脚本,进行标定,位置跟车载方案一致。机械臂连接到树莓派,在树莓派上执行下面脚本,启动标定。
数据集(data set):一组用于机器学习的数据的集合示例(instance):数据集中的一条数据记录特征向量(feature vector):一个示例在数学上的表示训练数据(trainning data):使用机器学习用来建立模型的数据样本空间(sample space):训练数据中用于作为条件的数据,即预测时的输入值标记空间(label space):训练数据中用于作为结果的数据...
简单使用三个平台进行Iot对比测试,接入过程点击查看文章:阿里云、百度云、腾讯云。门槛阿里云使用技术作为门槛,前100万条免费测试,但需要稍微有点技术基础,可以使用程序进行修改和测试。百度云使用1块钱作为门槛,首次使用需要交1块钱,1块钱有200万条测试。腾讯云没有设置门槛,广纳天下人才。 这样对比来看,感觉跟公司自身基因有关。阿里云作为集团重要的技术支撑和收入渠道,对技术更在...
评估跟录制数据集是同一个方法(lerobot/scripts/control_robot.py),不过增加了锚点作为输入,下面命令可以用来录制10个评估数据集。

项目核心包括软件系统和硬件系统两部分,用于提高车间管理效率:1. 硬件系统实现通过传感器对原生产设备的数据采集和控制;2. 软件系统实现生产数据的收集、存储、处理和展示,以及设备的基本控制...
阿里有详细的教程,教程跟实际的略微有差别,但整体还可以走完,过程不再多说:https://help.aliyun.com/document_detail/73705.html?spm=5176.11842913.1177534.13.5bc26e69sJWXY3价格阿里云这块收费分三项:第一项是数据通信次数,通信次数前100万次免费,之后每100万次一块钱第二项是设备连接时间,设备连...
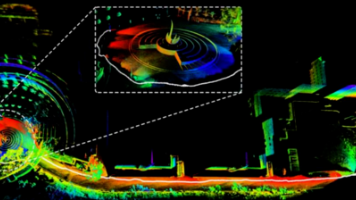
REF:基于多传感器融合的激光 SLAM 三维场景实时重建与路径规划方法研究。
版权归如下公司,禁止非授权转载:北京西普阳光教育科技股份有限公司(https://www.simpleware.com.cn)维周机器人科技有限公司(http://www.vejoe.com)文章目录【实验目的】【实验原理】一、DMA功能简介:二、DMA工作过程分析三、DMA库函数分析【实验环境】硬件设备:操作系统:软件环境:【实验步骤】一、 配置工程环境二、 完成DMA配置,并开启时...