




- @shinuone
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
文章摘要: Google AI Studio的模型配置面板提供多项参数调整功能。在模型配置部分,Gemini 3 Flash Preview作为轻量级模型适合实时交互场景,系统指令可设定行为准则且优先级高于用户输入,No API Key状态表示免费匿名使用但有诸多限制。基础配置中,Temperature参数控制输出随机性,Media resolution决定媒体解析精度,Thinking leve
当前AI产品主要分为三类:基础大模型(如GPT-5、Claude)、对话式AI(如ChatGPT)和AI智能体(如GitHub Copilot Agent)。在编程辅助领域,经历了从语法补全(2020-2023)到语义理解(2023-2025),再到智能体架构(2026至今)的演进,形成了Vibe Coding和Agentic Coding两大范式。Vibe Coding强调人机对话协作,而Age
Codex是由OpenAI开发的AI编程助手,集成在ChatGPT高级套餐中,能够帮助开发者编写代码、理解复杂代码库、进行代码审查和自动化开发任务。它支持在IDE中直接操作代码库,包括导航、编辑、执行命令和运行测试。用户可以通过API或账号登录使用Codex,并灵活配置其推理强度、响应风格和工作模式(如快速模式或计划模式)。Codex还提供技能扩展功能,允许安装预制技能包或创建自定义技能。对于Wi
本文系统梳理了三款代号为“虾”的智能工具产品。首先介绍开源工具 OpenClaw(开源虾),侧重其开放生态、核心功能与当前存在的局限性;其次分析腾讯电脑管家旗下的 QClaw(本地虾),聚焦其在本地系统管理、安全防护方面的产品信息与功能亮点;最后解读腾讯云的 WorkBuddy(办公虾),展示其在办公协同、云服务集成等场景下的核心能力。通过对比三款产品的定位、功能与不足,帮助读者快速选择适合自身场

FastAPI是一个基于Python的高性能Web框架,以其快速、易用和自动生成API文档等特点广受欢迎。本文介绍了FastAPI的基本使用,包括环境配置、创建Hello World应用、运行服务器以及自动生成的交互式API文档。通过示例代码演示了路径参数、查询参数和请求体的处理方式,展示了FastAPI结合Pydantic进行数据验证的能力。该框架特别适合需要快速开发RESTful API的场景

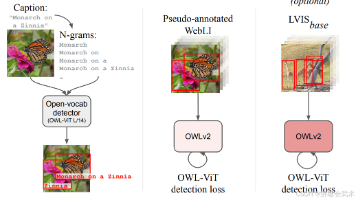
OWLv2(Open-World Localization version 2) 是Google DeepMind提出的开放词汇目标检测模型。其核心创新是自训练方法OWL-ST,将训练数据扩展至十亿级,大幅提升零样本检测性能(稀有类别AP提升43%)。支持图像引导检测(one-shot),可基于示例图寻找相似目标。但在电镜等专业科学图像中,因预训练数据分布偏移,泛化能力受限。
Obsidian是一款本地优先的笔记工具,核心功能是通过双链将笔记连成知识网络。Obsidian Skills是一组帮助AI处理Obsidian内容的技能说明,包含5个主要功能:生成规范笔记(obsidian-markdown)、整理网页内容(defuddle)、组织笔记视图(obsidian-bases)、创建思维画布(json-canvas)以及与运行中的Obsidian交互(obsidian

Obsidian是一款本地优先的笔记工具,核心功能是通过双链将笔记连成知识网络。Obsidian Skills是一组帮助AI处理Obsidian内容的技能说明,包含5个主要功能:生成规范笔记(obsidian-markdown)、整理网页内容(defuddle)、组织笔记视图(obsidian-bases)、创建思维画布(json-canvas)以及与运行中的Obsidian交互(obsidian
当前AI产品主要分为三类:基础大模型(如GPT-5、Claude)、对话式AI(如ChatGPT)和AI智能体(如GitHub Copilot Agent)。在编程辅助领域,经历了从语法补全(2020-2023)到语义理解(2023-2025),再到智能体架构(2026至今)的演进,形成了Vibe Coding和Agentic Coding两大范式。Vibe Coding强调人机对话协作,而Age
当前AI产品主要分为三类:基础大模型(如GPT-5、Claude)、对话式AI(如ChatGPT)和AI智能体(如GitHub Copilot Agent)。在编程辅助领域,经历了从语法补全(2020-2023)到语义理解(2023-2025),再到智能体架构(2026至今)的演进,形成了Vibe Coding和Agentic Coding两大范式。Vibe Coding强调人机对话协作,而Age