




- @qq_61467158
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
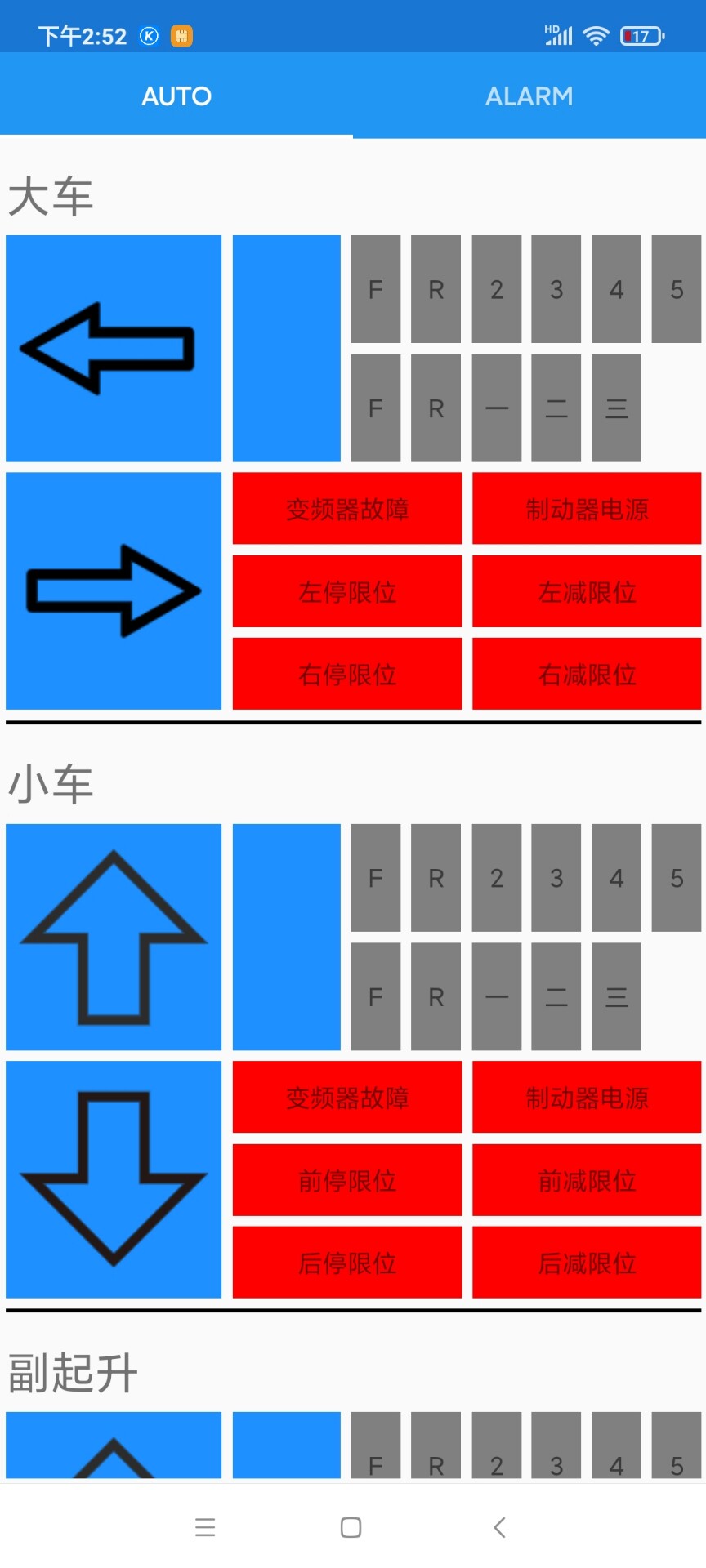
至此,JXQZ Android 端不仅是一个“遥控界面”,而是集高可靠通信、零延迟报警、企业级安全于一体的工业级移动终端,为起重机智能化提供了可复制的移动范本。JXQZ 起重机遥控 APP —— Xamarin.Android 端架构与运行时剖析。5,项目完整架构,本项目是针对起重机高空不易维护问题开发的。1,C#开发上位机手机APP,自己写的程序可提供部分。6,功能完善,数据库,语音报警,数据报
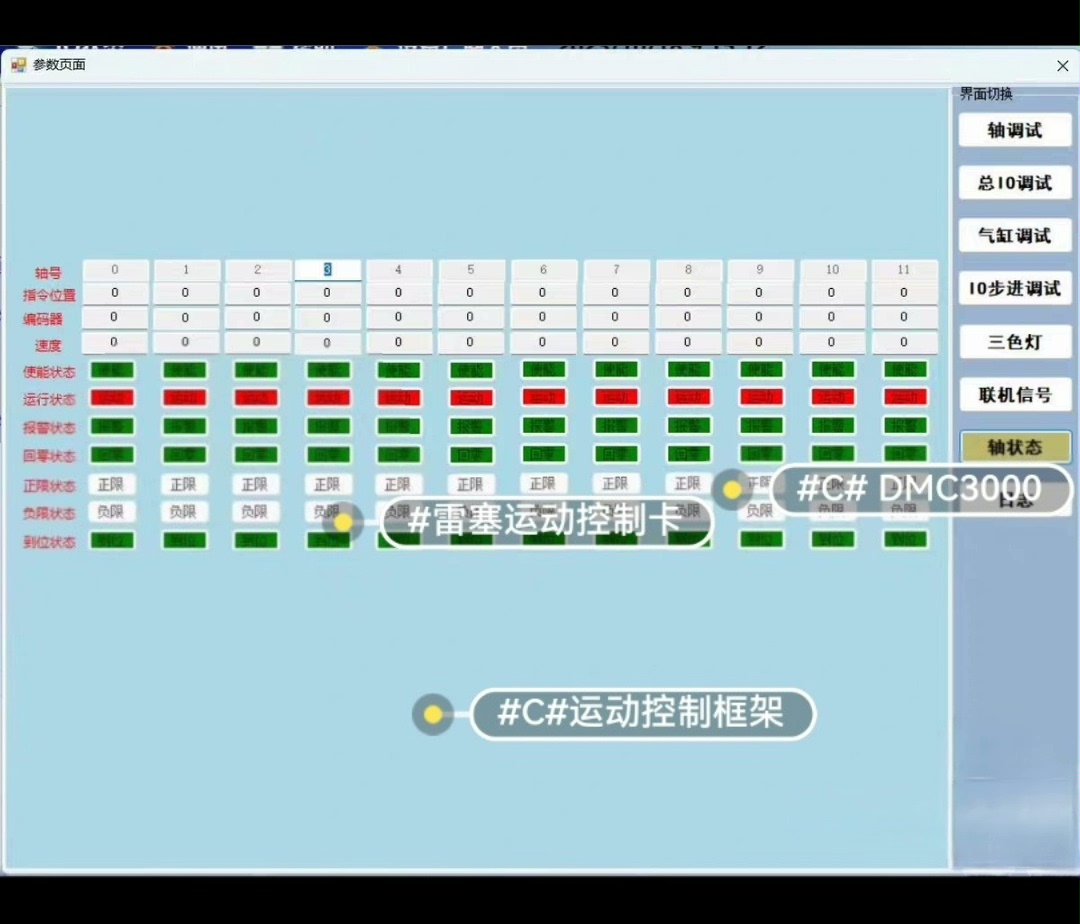
雷赛DMC3400/DMC3C00控制卡控制系统代码基于C#语言开发,适配.NET Framework 4.5框架,主要应用于自动辅料贴装设备。该系统具备良好的兼容性,通过替换库文件等代码,可适配高川控制卡、固高运动控制卡、正运动控制器等多种控制硬件,实现对设备运动、IO信号、视觉数据、PLC通信等多方面的精准控制与管理,同时具备完善的报警、日志及参数配置功能,为自动辅料贴装设备的稳定运行提供全面
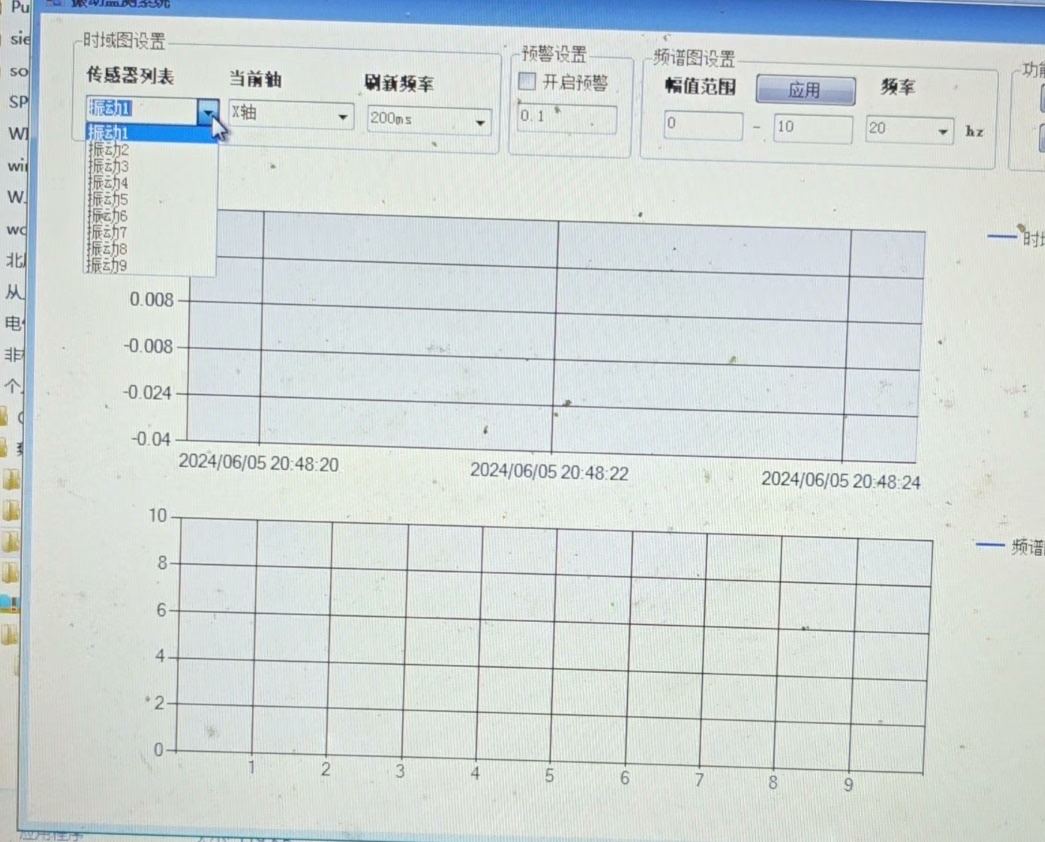
最近在搞工业设备监控系统的时候,需要实时采集振动和温度数据。正好用C#搭了套方案,这里把核心代码和实现思路分享一下。先上张效果图镇楼(假装有图),频谱图和时域图同屏显示还挺酷的。整个系统跑下来,最吃资源的其实是频谱计算部分。C#频谱图振动传感器温度传感器数据采集绘制频谱图和时域图,并存储数据库存储时间200ms左右,可以进行历史频谱图和时域图回放,可以求的最大值并设置阈值报警可以导出报警。不过实际
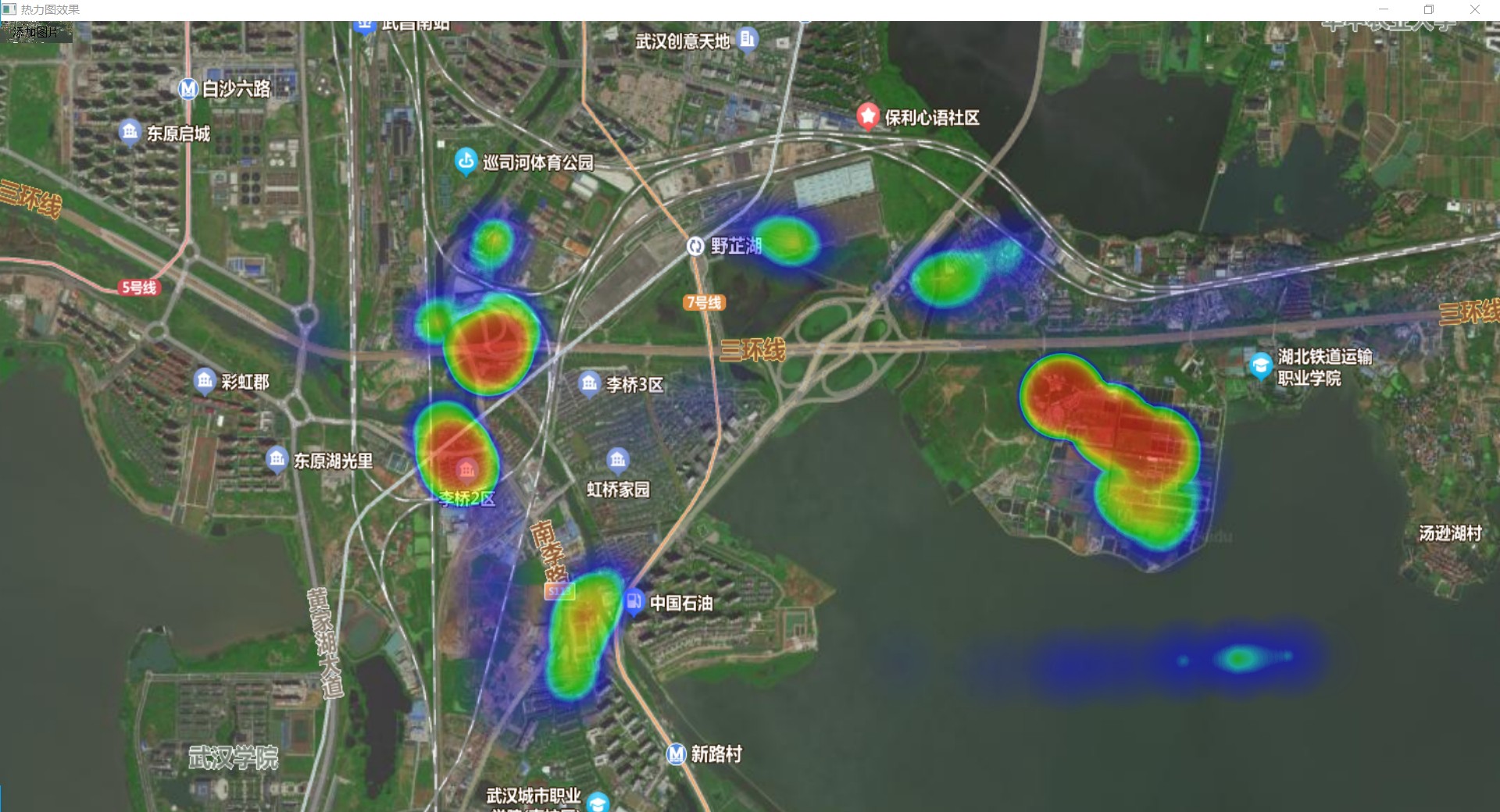
总的来说,这个热力图功能的实现并不复杂,主要是通过鼠标点击来更新热力值,然后根据热力值来绘制颜色。新增的轮廓圈颜色设置也让这个功能更加灵活。如果你对这个功能感兴趣,可以下载源码自己试试看。源码已经用Qt5.6.1MinGW和Qt5.13.1MinGW编译通过,其他版本可能需要稍作调整。好了,今天的分享就到这里,希望对你有帮助!
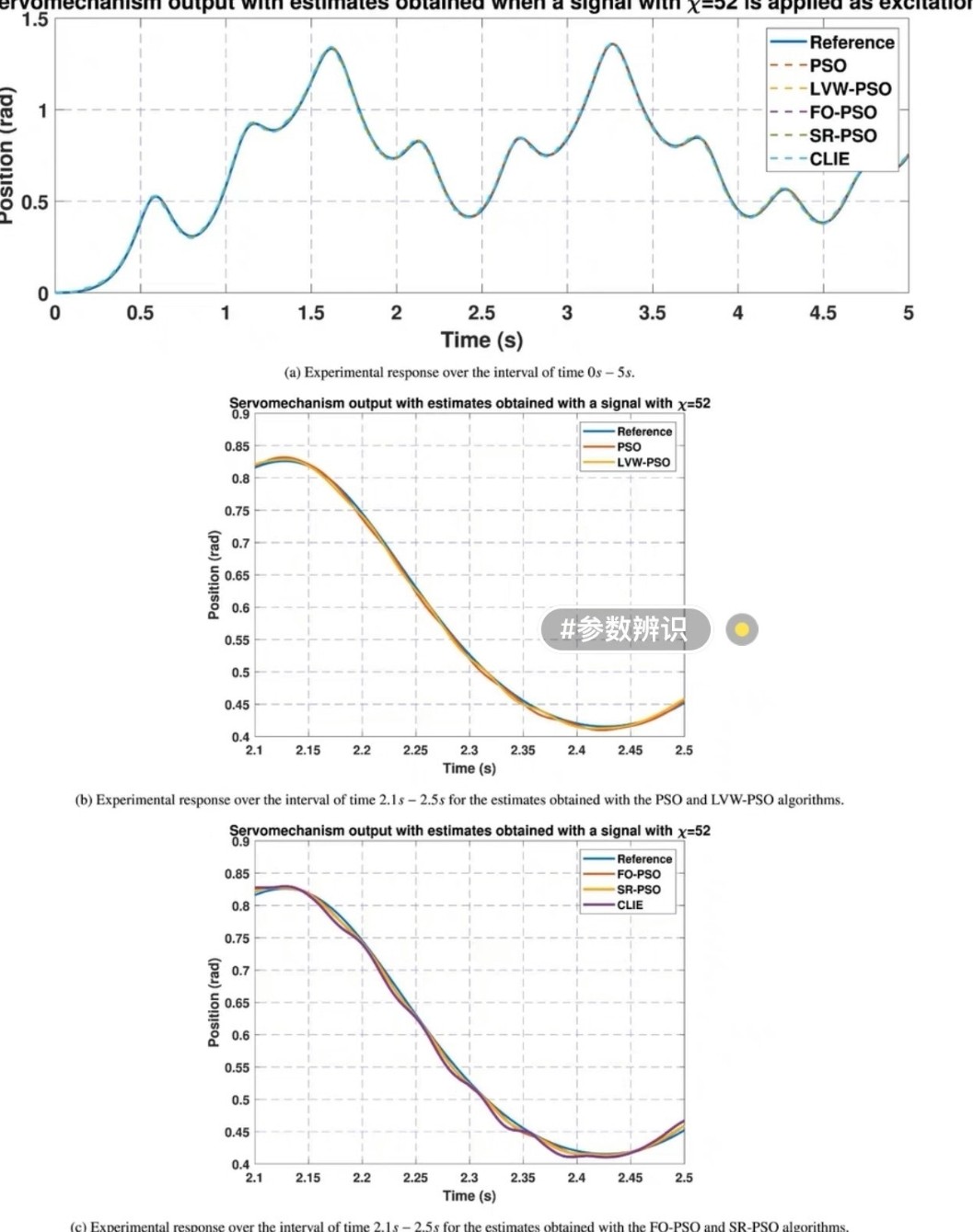
遗传算法:借鉴生物进化中的遗传、变异和选择机制,通过对种群个体进行操作来寻找最优解。在 MATLAB 中有专门的遗传算法工具箱ga,使用起来非常方便。在 Python 中也有DEAP等库来实现遗传算法。灰狼算法:模拟灰狼群体的社会等级和捕食行为,通过迭代更新狼的位置来寻找最优解。其实现过程中涉及到对狼的领导者、追随者等角色的模拟,在 MATLAB 和 Python 中都能根据算法原理进行代码实现。
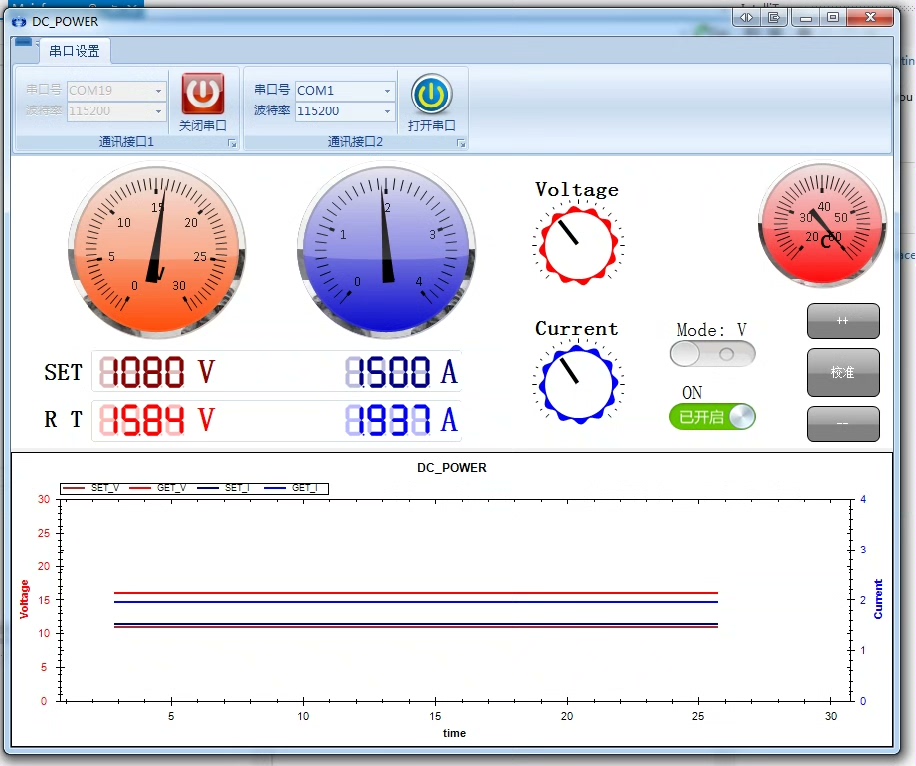
源码和STM32工程已打包,Github链接:https://github.com/xxxx/power-monitor (注:此为示意地址)下回咱们可以聊聊怎么用C#做PID参数整定界面,想看的评论区吱个声~1.该程序利用了codeproject上的zedgraph(绘图)、knob(表盘旋钮)、manometers(表盘)、ribbon、lbindustrialctrls(数码管等)这些控件,
最后放个三种控制器的性能对比彩蛋:在斜坡信号跟踪场景下,改进模糊PID的积分绝对误差(IAE)比经典PID降低62%,比普通模糊PID降低28%。咱们就拿经典的PUMA机械臂当小白鼠,用三种不同的PID控制器调教它的关节速度响应。配合ADAMS的柔性体仿真模块,还能观察到连杆的微小形变对控制效果的影响,这可是纯MATLAB仿真发现不了的细节。欢迎交流,可以根据需求进行仿真adams仿真,四足机器人
毕竟全套资料都摊开了,连商业方案最爱的G代码预读缓存算法都没藏着掖着。先看硬件架构:PCB底板四层沉金工艺,电机驱动和主控区域用铜箔做了物理隔离。特别是编码器反馈电路,用了光耦隔离加差分信号传输,实测抗干扰能力比某品牌工控板强两档。USB运动控制 (五轴雕刻机系统)全部开源 不保留任何关键技术,PCB可直接生产,C++6.0源码,从13.7-18.2所有版本,本产品为可复制资料,支持五轴联动,支持

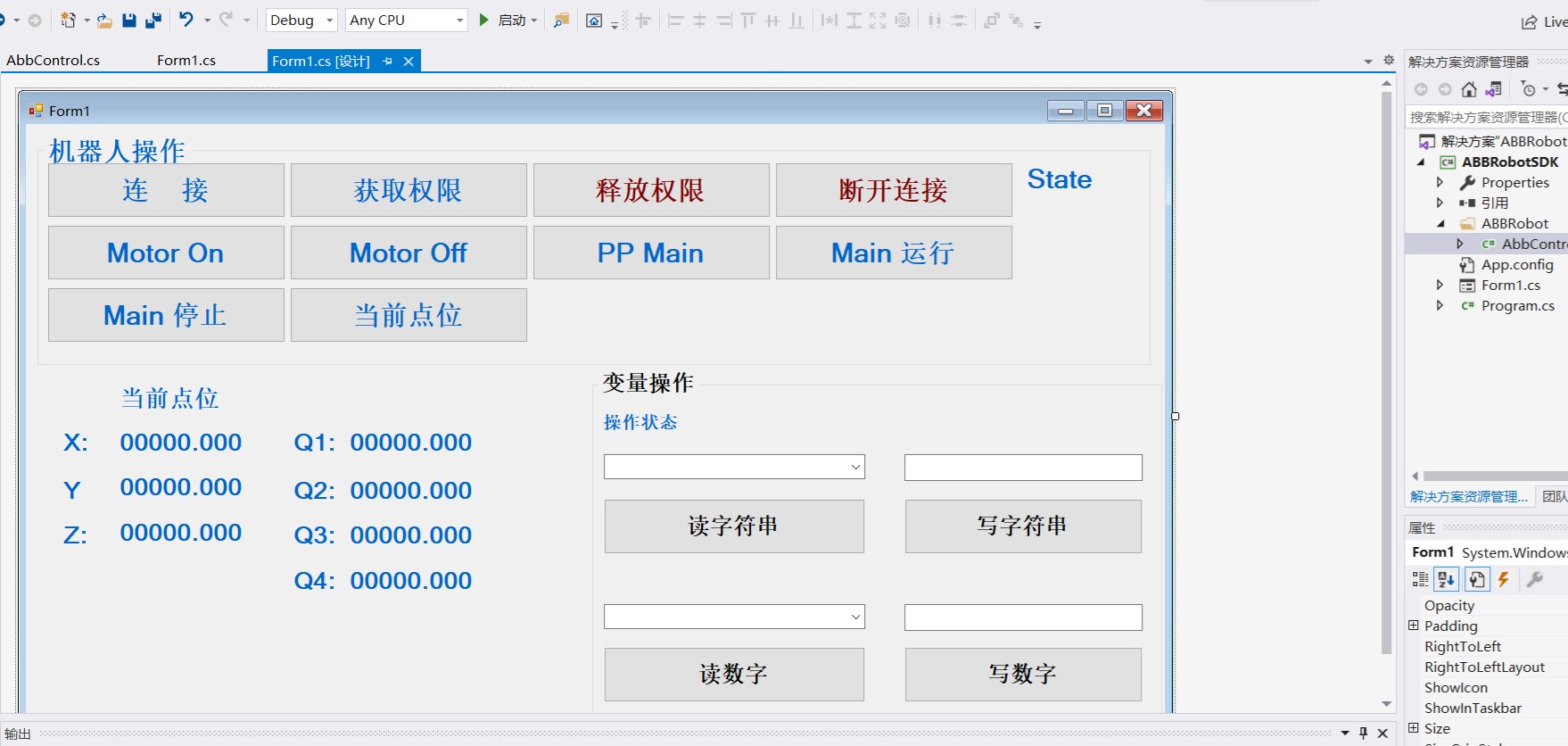
通过这种方式,利用C#结合自定义的ABB机器人类,就能轻松实现对ABB机器人点位信息的读取和写入,为ABB机器人的二次开发提供了有力支持,满足各种复杂的自动化任务需求。而二次开发能让ABB机器人更好地适配特定业务场景,今天咱们就来聊聊如何用C#实现对ABB机器人数据的读取和写入,特别是点位信息的获取与写入。首先,咱自己写了个ABB机器人类,这个类涵盖了机器人常规操作功能,为二次开发奠定了良好基础。
要是相机突然掉线,机器人自动切到示教模式,别硬刚——安全永远是第一位。今天就拿安川机器人举个栗子,说说怎么用MotoPlus玩转TCP/IP通信,让机械臂和视觉系统谈上恋爱。安川机器人TCPIP通信程序 YASKAWA安川机器人以太网TCPIP通讯,MotoPlus源代码,socket通信文件,.OUT文件。先说个实战场景:机器人要给相机发触发信号,等相机拍完照再把坐标数据传回来。这活儿听着简单,
