




- @qq_60513199
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
惠普win10突然无法连接wifi(校园网),但是可以连手机热点, 重置网络、重启、刷新DNS都不行。解决:网络和internet---代理---关掉手动设置代理。分析:可能是开了代理导致。
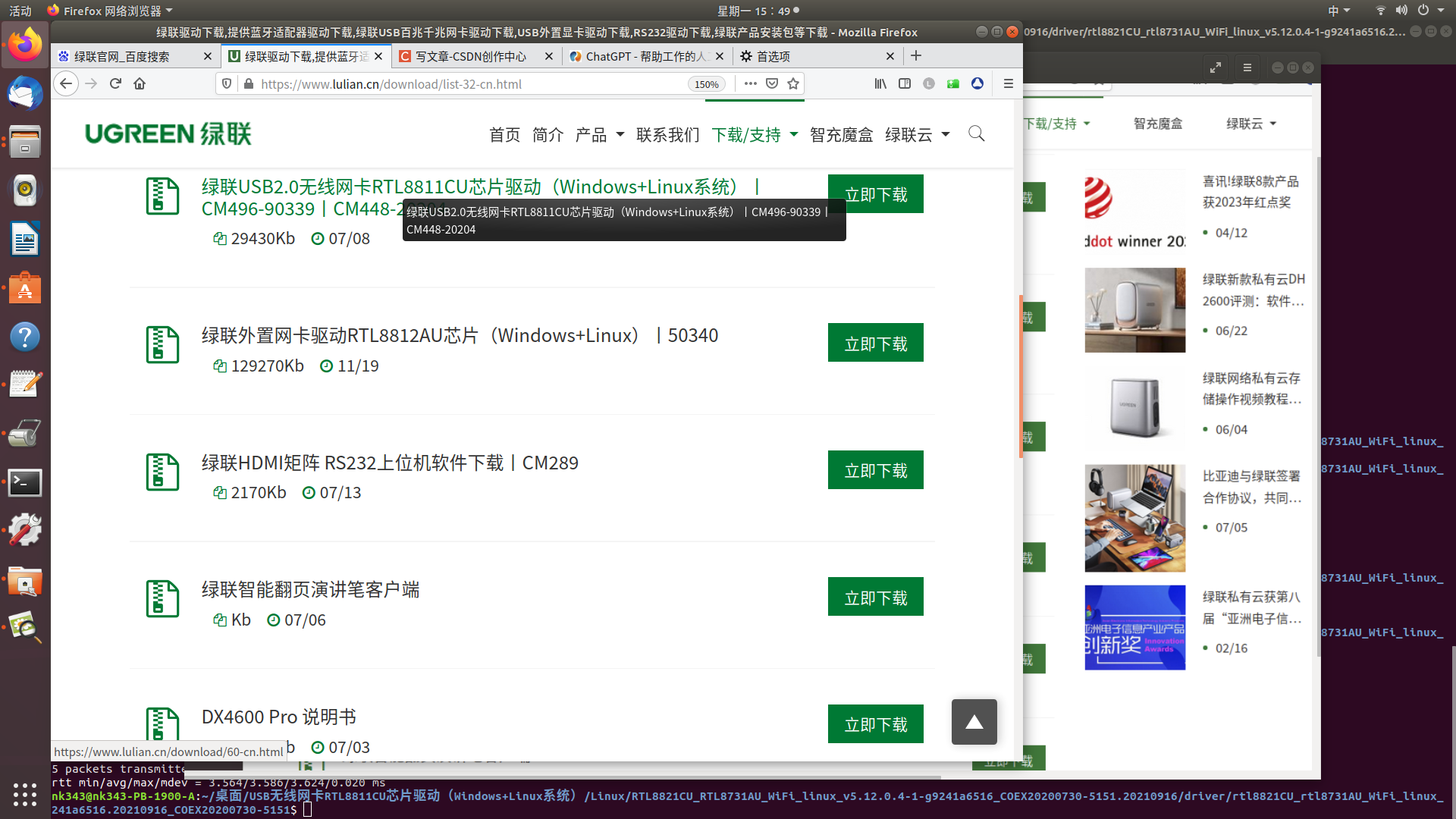
ubuntu18.04(linux)安装绿联ac650无限网卡(cm448)驱动踩了一些坑所以特地记录下来,供各位参考
无人车部分传感器布置图。

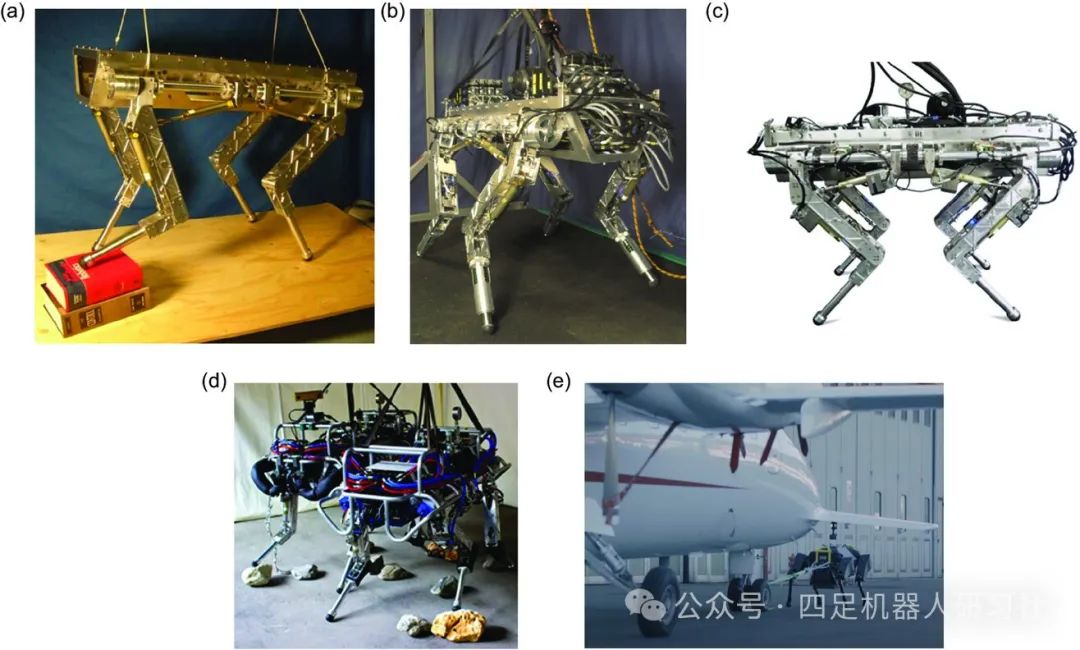
足式机器人的出现,使得机器人通过复杂地形的能力大大提升。与一般的轮式机器人相比,其灵活性也大大增加。例如在越障中,轮式机器人往往难以跨越比自身车轮半径高的障碍物,或者通过复杂地形时容易出现“嵌顿”现象而失效,而足式机器人通过合理的结构设计和步态规划却可以轻松跨越各种具有挑战性的地形。尽管在不平度远小于车轮半径的起伏路面上,轮式机器人可以通过充气轮胎或其他弹簧阻尼系统的隔振,来保证机器人运动的平稳性
四足机器人机械本体设计 动物的腿部是由髋骨、大腿骨、小腿骨、足骨和趾骨 组成,与躯干连接,形成了 5 个自由度关节。而目前大多 数机器人每条腿都只具有 3 个自由度,为了简化机器人 的自由度,一般将小腿骨、足骨和趾骨看成一个刚性部 件,或者将小腿骨与足骨看成刚性部件,足骨与趾骨中 间增加一个被动自由度,用于减振作用。

A.发展现状四足机器人广泛运用于航空航天,军事作战,消防巡检等领域。根据末端执行机构的方式不同,移动机器人可以被分为轮式机器人、腿式机器人和履带式机器人等。其中,轮式机器人具有结构和控制简单,易于设计和操作,平坦的地面能灵活快速移动的特点;缺点在于非结构环境下轮式移动机器人的越障能力和运动平稳性差。履带式机器人有以下优点:接地比压小、支撑面积大并具备很强的道路适应能力,但存在缺点:自身重量较大、移

欢迎关注微信公众号 “四足机器人研习社”,本公众号的文章和资料和四足机器人相关,包括行业的经典教材、行业资料手册,同时会涉及到职业知识学习及思考、行业发展、学习方法等一些方面的文章。前情提要:》》》》

知道了机器人的基本构成之后还不够,还需要知道基本组成部分的一些物理信息,例如连杆的质量属性,惯量属性,颜色,以及关节的种类,这到底是转动关节还是平动关节。同理设置第二个连杆:1——设置连杆名字——2设置关节名字——3选择关节坐标系——4选择关节轴——5选择关节类型,其中revolute是有关节限位的,是一般的机器人关节类型,而continous是无限旋转的,如车轮关节,prismatic是平移关节
凭借其独特的与地面的点接触能力和对复杂地形的出色适应性,四足机器人已成为自动化和机器人工程领域的焦点。这些机器人在结构设计、运动规划、平衡控制等方面取得了重大研究进展。然而,当前研究的主要挑战在于进一步提高动态性能、环境适应性和有效载荷能力。本文全面讨论了四足机器人在结构设计、步态规划、传统控制策略、智能控制策略和自主运动等关键技术领域的研究成果。本文重点分析了上述领域的智能化和技术创新趋势,旨在
由于四足机器人是高度冗余的系统,结构的复杂性给控制带来较大的难度,基于无模型的VMC控制,类似于笛卡尔空间的PD控制,不涉及四足机器人的运动学和动力学逆解,只需要计算雅可比矩阵,便可通过力雅可比矩阵将工作空间的力映射到关节空间,从而获得关节期望力矩并下发给各个关节电机。此外,为了使机器人在复杂环境中也能更好的平衡,有的还给机器人装上了二自由度的尾巴,该尾巴如一个倒立摆,额外引入了两自由度尾巴,通过
