




- @qq_57594025
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
资料来源于硬件家园:资料汇总 - FreeRTOS实时操作系统课程(多任务管理)单片机资源越来越丰富,加上合作式调度器的系统实时性不够好,合作式调度已经很少用了,FreeRTOS在新的版本中已不再更新抢占式调度器提供了一种多任务的的系统结构,高优先级任务可以抢占低优先级任务的CPU使用权,使得系统实时性非常好。使用抢占式调度器时,根据任务重要程度合理分配优先级,CPU会优先执行就绪列表中优先级最高
能及时的响应外部事件请求,并能控制所有实时设备和实时任务协调运行,且能在一个规定的时间内完成对事件的处理,那么这种系统就称为实时操作系统。
目录1.pwm_out.c2.pwm_out.h初始化及翻转输出中断服务函数2.pwm_out.h
2.rtc.h3.实时刷新
目录1.pwm_out.c2.pwm_out.h初始化及翻转输出中断服务函数2.pwm_out.h
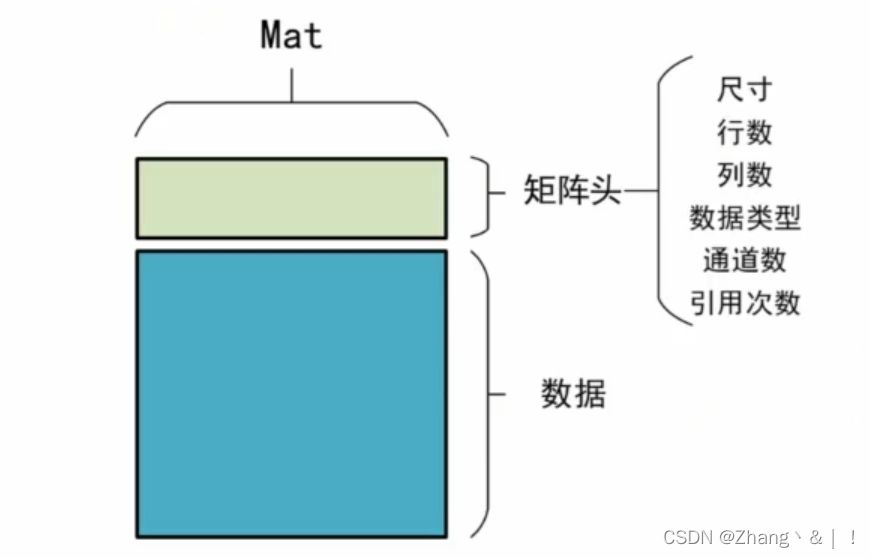
Mat类是OpenCV中用于存储矩阵数据的类型。
16位递增计数器,有DMA请求生成,捕获比较通道数0,所在总线:APB1,只具有定时功能,有连续定时模式和单次定时模式基本定时器TIM6和TIM7各包含一个16位自动装载计数器,由各自的可编程预分频器驱动。它们可以作为通用定时器提供时间基准,特别地可以为数模转换器(DAC)提供时钟。实际上,它们在芯片内部直接连接到DAC并通过触发输出直接驱动DAC。两定时器相互独立,不共享任何资源通用定时器是一个
/ 当前页面剩余可写字节数// 计算当前页剩余可写字节数// 如果要写入的数据长度小于等于当前页剩余可写字节数,直接写入当前页} else// 如果要写入的数据长度超过当前页剩余可写字节数,需要进行分页写入while (1)// 写入当前页数据break;// 数据已全部写入} else// 更新缓冲区指针、写入地址和剩余长度// 根据剩余长度判断下一页要写入的字节数} else// 发送指令//
当有多个消息发送到消息队列时,通常是将先进入消息队列的消息先传给任务,也就是说,任务先得到的是最先进入消息队列的消息,即先进先出原则(FIFO),FreeRTOS的队列也支持后进先出原则(LIFO)。3. 消息队列还有两个函数 xQueueSendToBackFromISR 和 xQueueSendToFrontFromISR,函数xQueueSendToBackFromISR 实现的是 FIFO