




- @qq_51482778
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
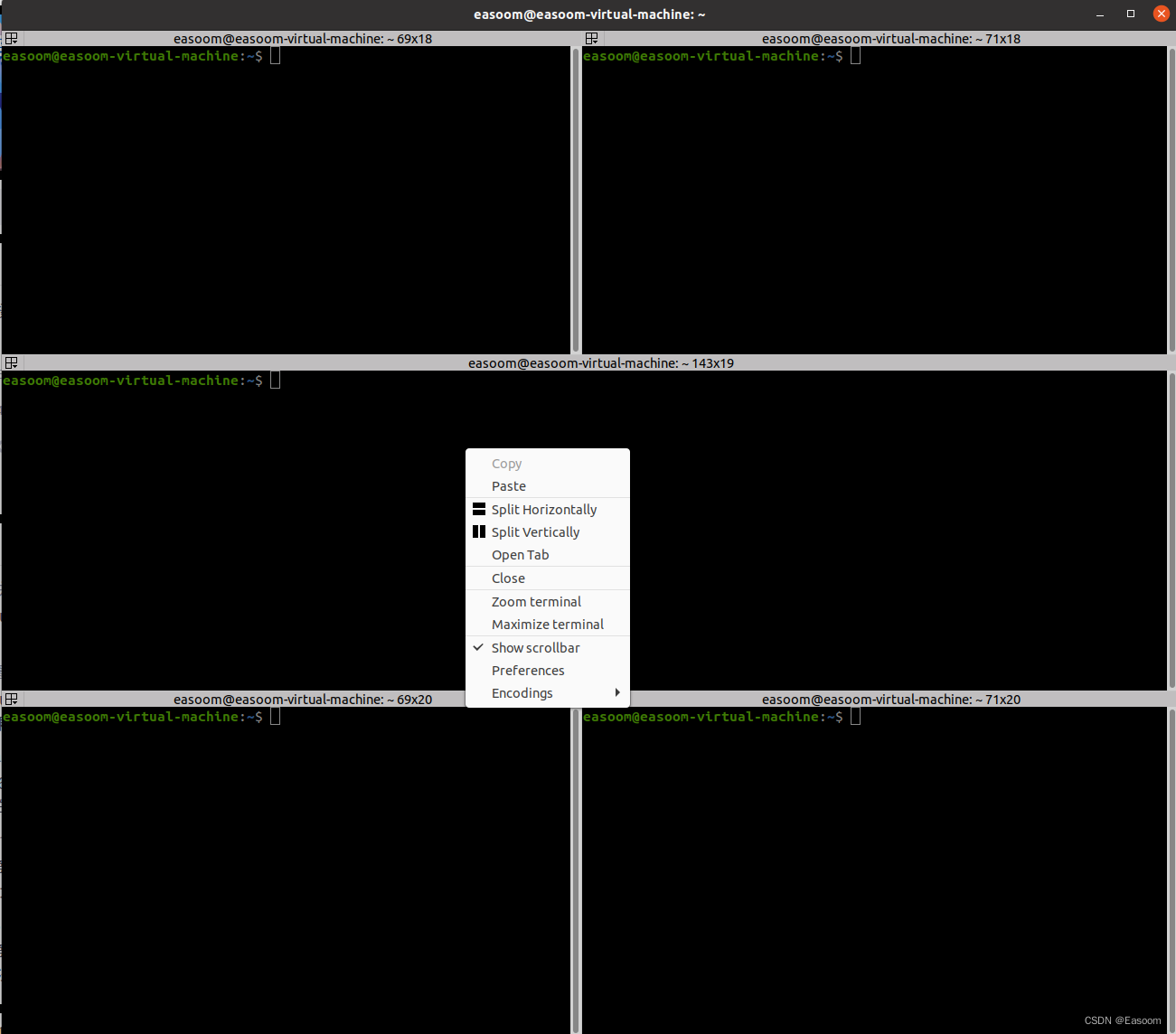
或者,也可以直接使用快捷键。Ctrl+Shift+P or Ctrl+Shift+Tab//Crtl+Shift+Tab 移动到之前的一个终端。Ctrl+Shift+Q//退出当前窗口,当前窗口的所有终端都将被关闭。Ctrl+Shift+Right//在垂直分割的终端中将分割条向右移动。Ctrl+Shift+Left//在垂直分割的终端中将分割条向左移动。
遗传算法实验

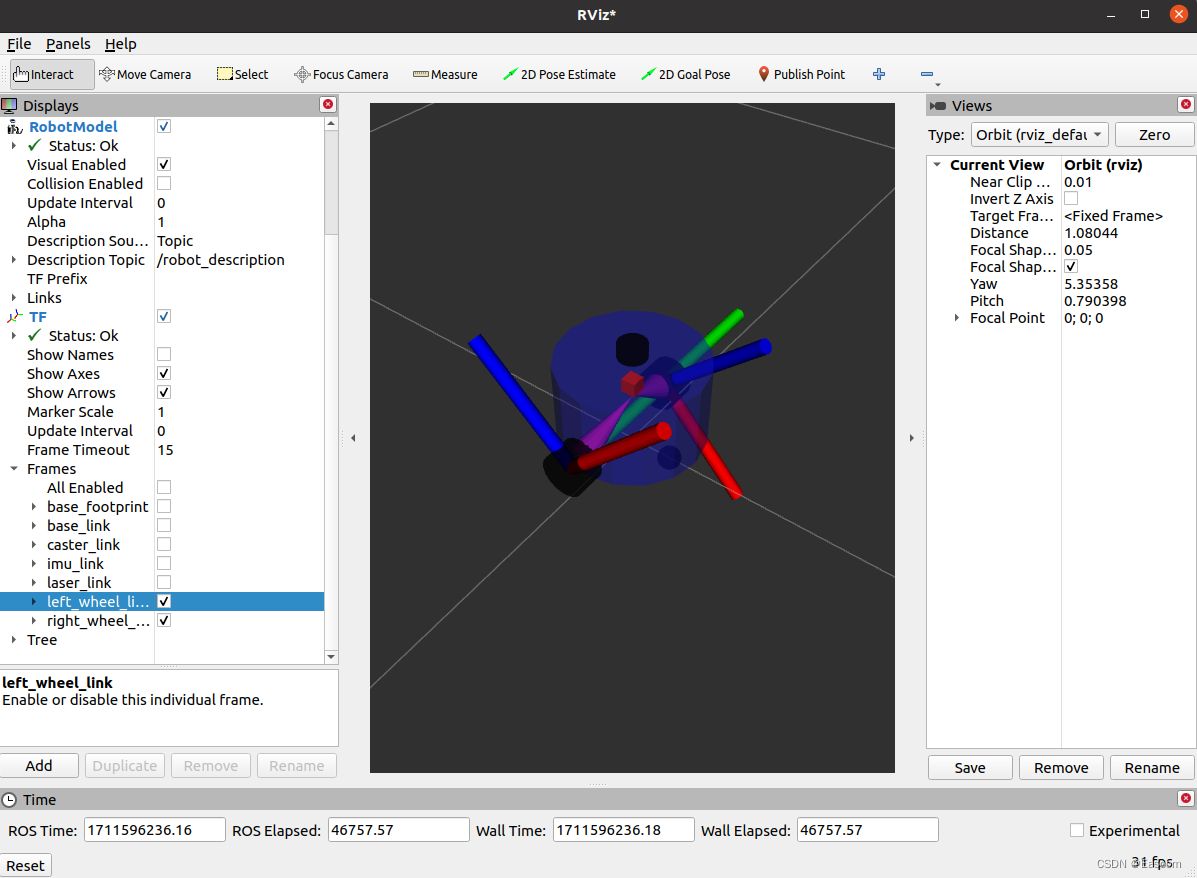
机器人控制通过上一章节,学习了如何通过URDF描述一个机器人,现在开始学习如何控制这个机器人跑起来。首先,先把那个圆柱体补全成一个差速结构的小车。下面开始编辑URDF文件,添加其他link和joint,每次添加后,需要重新编译代码,重启RVIZ2。1. 添加imu编写URDF,描述一个位于中心正上方2cm,长宽高均为2cm的正方体。<!-- imu link --><link n
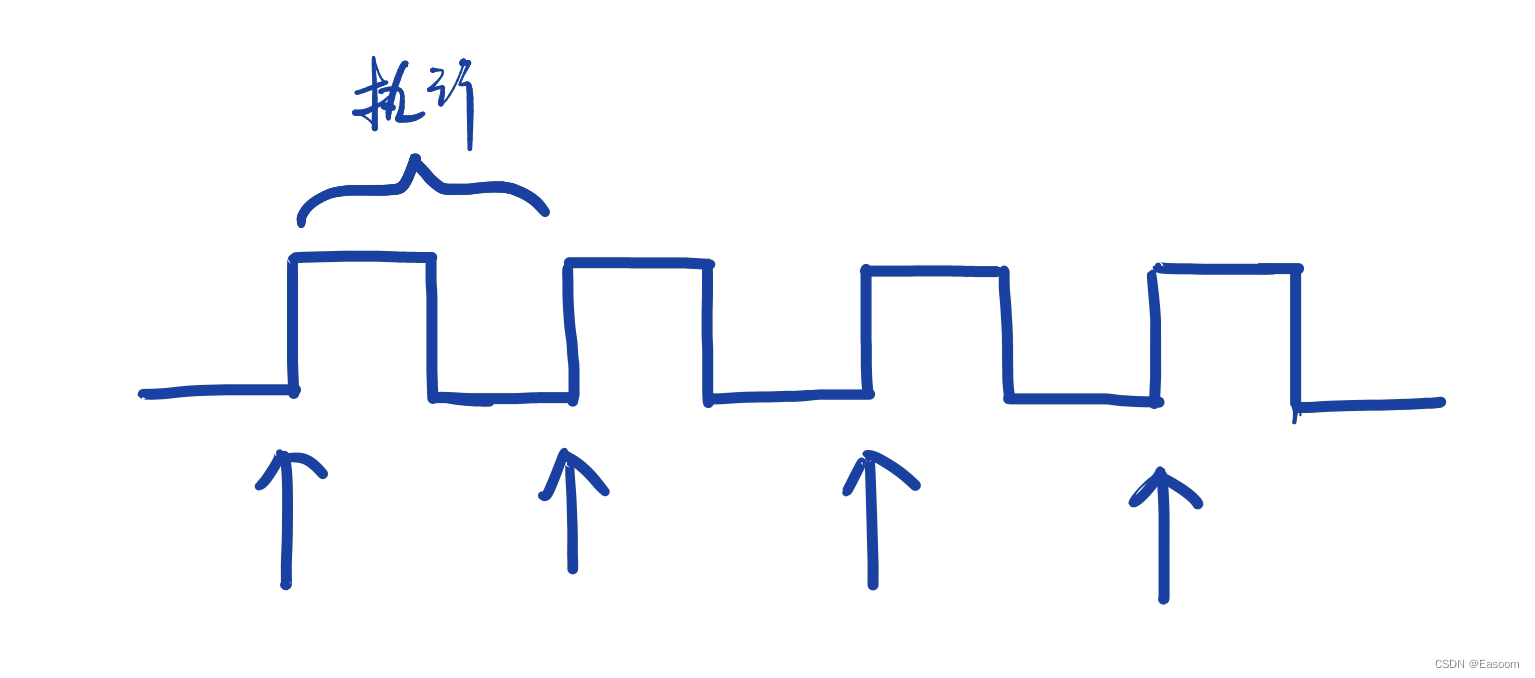
是 ROS 中用于控制循环频率的方法之一。在 ROS 的节点中,通常会在循环中执行一些操作,例如读取传感器数据、执行控制指令等。为了控制节点的循环频率,可以使用方法。rate并不是简单的延时函数,个人理解为,它通过发送设置频率的方波,循环在上升沿触发进行执行,如下图:但也就存在两个问题,当“执行”的时间小于或者大于rate设定周期时间。
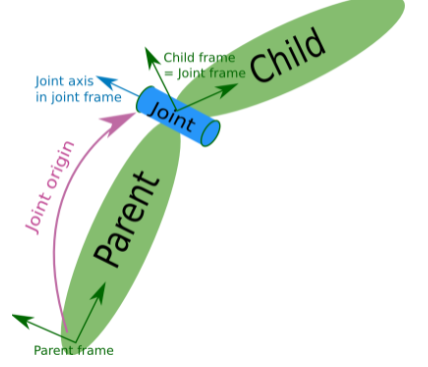
采用URDF(Unified Robot Description Format)统一机器人描述格式,URDF使用XML格式描述机器人文件。列表包含了要安装到系统中的其他文件和目录,以及它们的安装路径。:关节(Joint),通过这两种组件即可完成对一个机器人的描述。对象中,并将其返回,以便由 ROS 2 的启动系统加载并执行。通过代码的形式描述机器人的各个组件,以及组件之间的联动关系。运行起来会跳出
前面记录了通过GNU套件以及CMAKE配置文件进行C/C++代码的编译调试, 本文记录基于VSCode IDE搭建C/C++开发环境, 以实现更优雅的ctrl c/v.
采用URDF(Unified Robot Description Format)统一机器人描述格式,URDF使用XML格式描述机器人文件。列表包含了要安装到系统中的其他文件和目录,以及它们的安装路径。:关节(Joint),通过这两种组件即可完成对一个机器人的描述。对象中,并将其返回,以便由 ROS 2 的启动系统加载并执行。通过代码的形式描述机器人的各个组件,以及组件之间的联动关系。运行起来会跳出