




- @qq_45780647
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
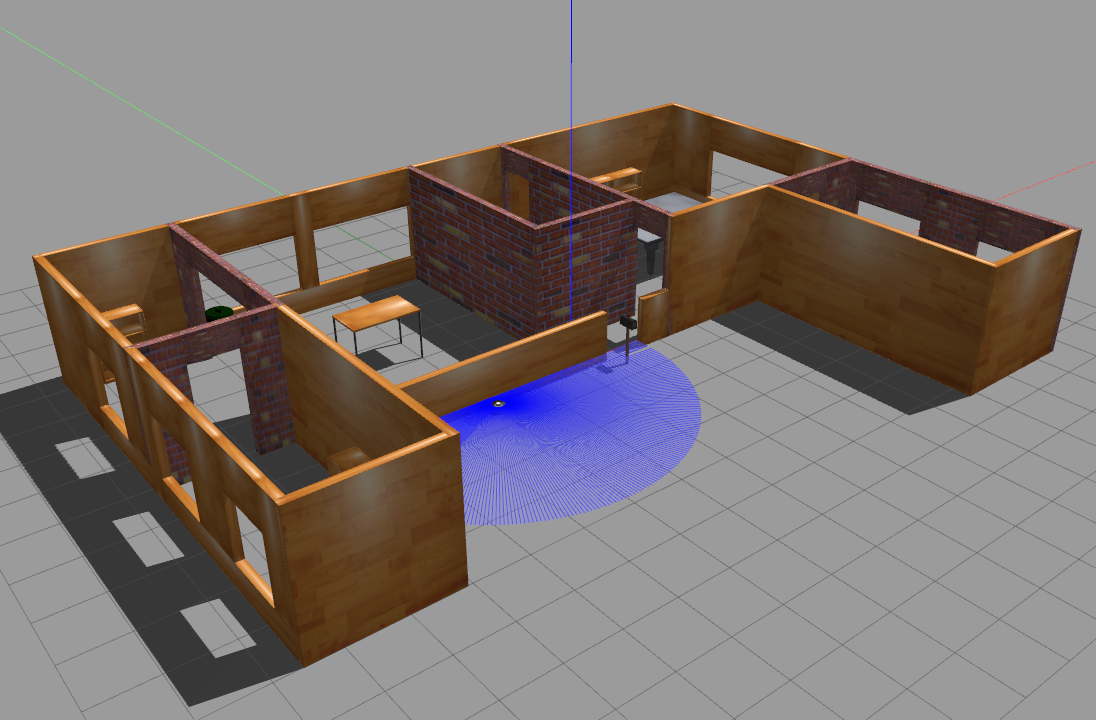
本文介绍了TurtleBot3在Gazebo仿真环境中的操作方法,涵盖了遥控操作和自主避障功能。通过执行相关命令,启动遥控节点和自主驾驶节点,实现TurtleBot3的手动控制和自动避障。RViz2被用作可视化工具,以帮助实时监控机器人的状态。该过程为移动机器人路径规划和控制提供了有力支持。
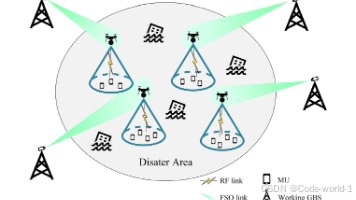
本文介绍了多智能体强化学习(MARL)的发展与挑战,重点分析了该领域的核心问题和研究方向。MARL应用于自动驾驶、机器人协作等场景,区别于单智能体强化学习,面临非平稳性、信用分配、部分可观测性、通信与协调等困难。文章概述了MARL的主要方法,如独立学习、集中评论器、值函数因式分解等,并展望了未来的研究趋势,包括多模态感知、跨任务迁移学习、智能体因果推理及语言交流等方向。最后,推荐初学者从MPE环境
本文介绍了如何在Ubuntu上安装并配置ROS Noetic版本,涵盖了软件包仓库的配置、密钥设置、ROS环境的初始化及依赖包的安装等步骤。通过提供详细的命令和操作流程,帮助读者顺利完成ROS的安装过程,并为后续的机器人开发和应用奠定基础。

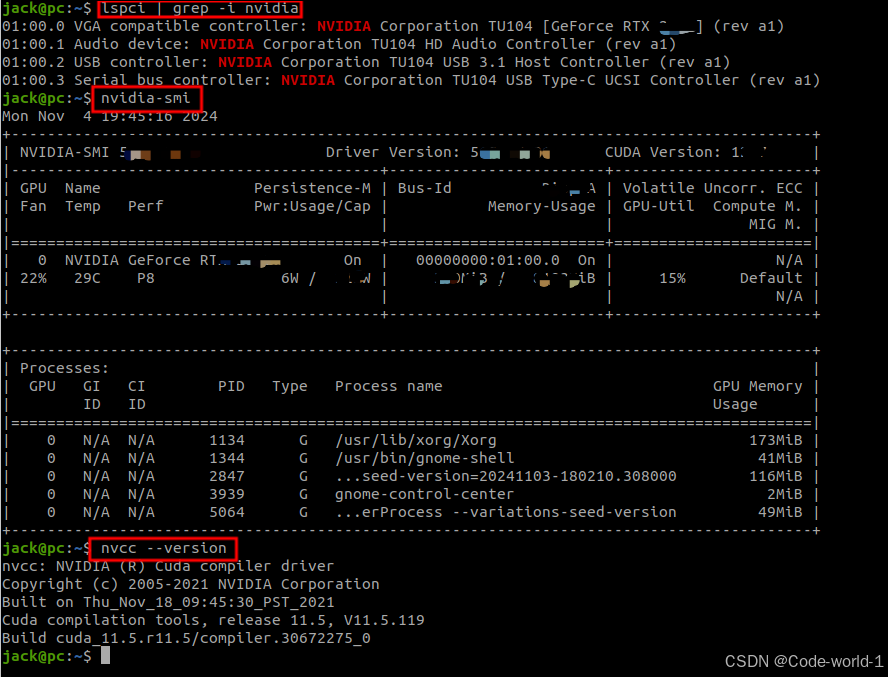
本文介绍了在 Ubuntu 系统上安装 CUDA 和 PyTorch 等 GPU 深度学习环境的流程。重点强调了使用命令 nvidia-smi 检查 NVIDIA 驱动和 CUDA 版本的重要性,以及通过 PyTorch 的 torch.cuda 模块验证 GPU 的可用性、数量和当前使用的 GPU。这些步骤为深度学习和深度强化学习项目提供了必要的技术支持,确保在训练和应用算法时系统具备充足的计算
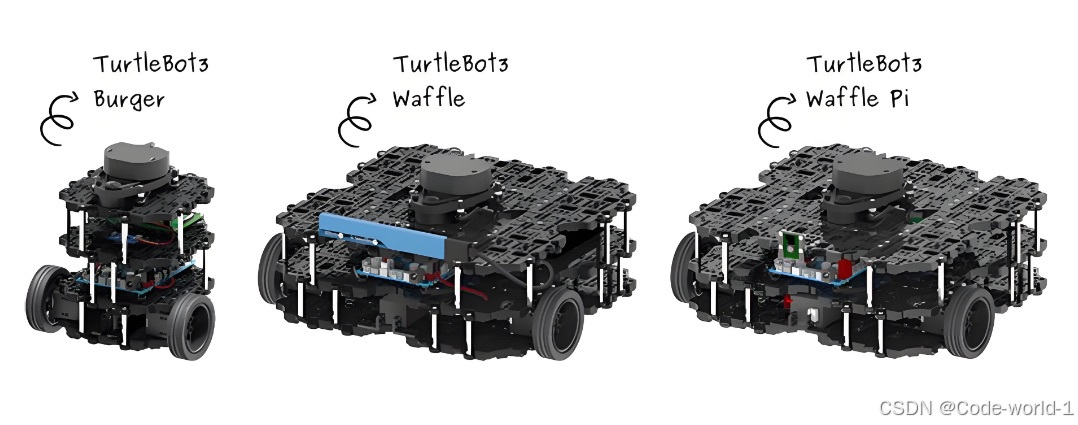
TurtleBot3 Burger是一款小型、开源的移动机器人平台,适用于机器人教育和研究。它配备了STM32微控制器、360°激光雷达、IMU传感器等,支持精准的运动控制与环境感知。驱动系统由两个电机和万向轮组成,提供灵活的机动性。平台运行ROS操作系统,支持Gazebo仿真,具有丰富的扩展性,用户可通过多个通信接口连接自定义设备,是一个高效、易用的机器人开发工具。
本文介绍了多智能体强化学习(MARL)的发展与挑战,重点分析了该领域的核心问题和研究方向。MARL应用于自动驾驶、机器人协作等场景,区别于单智能体强化学习,面临非平稳性、信用分配、部分可观测性、通信与协调等困难。文章概述了MARL的主要方法,如独立学习、集中评论器、值函数因式分解等,并展望了未来的研究趋势,包括多模态感知、跨任务迁移学习、智能体因果推理及语言交流等方向。最后,推荐初学者从MPE环境
本文介绍了多智能体强化学习(MARL)的发展与挑战,重点分析了该领域的核心问题和研究方向。MARL应用于自动驾驶、机器人协作等场景,区别于单智能体强化学习,面临非平稳性、信用分配、部分可观测性、通信与协调等困难。文章概述了MARL的主要方法,如独立学习、集中评论器、值函数因式分解等,并展望了未来的研究趋势,包括多模态感知、跨任务迁移学习、智能体因果推理及语言交流等方向。最后,推荐初学者从MPE环境
本文介绍了如何使用Win32DiskImager和Rufus等工具制作系统启动盘。学习目标是掌握制作启动盘的基本步骤,以便独立将ISO镜像文件写入USB闪存驱动器,确保顺利安装或修复系统。文章首先推荐了适合的工具,并指导读者准备一个至少6-8GB的空U盘和所需的系统镜像文件。以Win32DiskImager为例,详细说明了选择镜像文件和目标驱动器的操作,帮助读者顺利完成启动盘制作,为后续的系统安装

本文介绍了如何解决 Ubuntu 和 Windows 双系统时间不同步的问题。由于 Ubuntu 默认使用 UTC 时间,而 Windows 使用本地时间,导致两者时间不一致。通过安装 ntpdate 工具同步时间、使用 sudo hwclock --localtime --systohc 将系统时间同步到硬件时钟,并设置硬件时钟为本地时间,可以有效解决此问题。此外,启用自动时间同步服务 syst

本文分析了Ubuntu、ROS和Python版本之间的支持关系。随着各版本的快速更新,选择合适的组合对机器人系统的稳定性与性能至关重要。对于新项目,推荐使用支持广泛的ROS 2和兼容的LTS版本,以确保长期支持与功能丰富性。通过详细对比,不同需求的开发者可以更有效地配置环境,加速项目开发。
