




- @qq_44905692
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
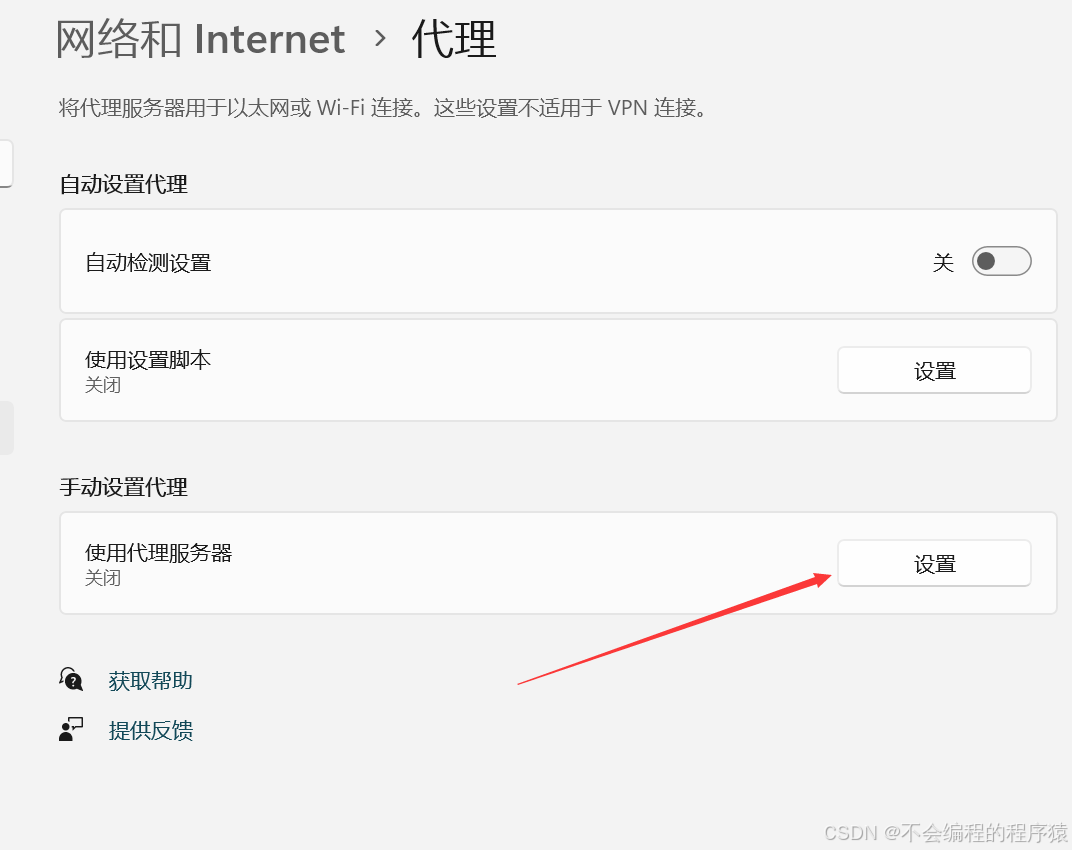
二、 输入回车设置完成,就可以正常clone了,甚至不用梯子。一、打开设置搜索 代理,找到自己电脑的代理ip和端口。
无人机的运动决策是指无人机在复杂环境中,根据当前的感知信息和历史记忆,决定下一步如何移动(例如前进、转向、避障等)。运动决策的目标是让无人机能够高效、安全地从起点导航到目标点,同时避免与障碍物碰撞。时间和空间注意力机制?首先是 注意力机制(Attention Mechanism),他是深度学习中的一种技术,能够帮助模型在处理复杂数据时,专注于最重要的信息。帮助无人机在视觉感知中,重点关注环境中的关

QGroundControl 主要通过 MAVLink 协议与无人机通信。通信层负责处理所有 MAVLink 消息,并将这些消息传递给相应的业务逻辑层进行处理。QGroundControl 的模块化设计使其具备良好的扩展性。QGroundControl 由多个层次构成,每个层次负责不同的功能。QGroundControl (QGC) 作为一个开源地面控制站软件,其设计原则是模块化、高扩展性和高可维

在弹出的命令提示符窗口中,输入netsh winsock reset,然后按回车键。Windows PowerShell(管理员)”按下键盘上的Windows键+X键,打开菜单。最后,重启电脑即可解决问题。

无人机的运动决策是指无人机在复杂环境中,根据当前的感知信息和历史记忆,决定下一步如何移动(例如前进、转向、避障等)。运动决策的目标是让无人机能够高效、安全地从起点导航到目标点,同时避免与障碍物碰撞。时间和空间注意力机制?首先是 注意力机制(Attention Mechanism),他是深度学习中的一种技术,能够帮助模型在处理复杂数据时,专注于最重要的信息。帮助无人机在视觉感知中,重点关注环境中的关
通过识别和优化常见的性能瓶颈,使用合适的算法和数据结构,以及优化内存管理和I/O操作,C++程序的性能可以得到显著提升。
连接无人机:确保 QGC 成功连接到无人机。接收 MAVLink 消息:通过信号与槽机制接收 MAVLink 消息。解析 MAVLink 消息:使用 MAVLink 提供的解析函数提取传感器数据。显示和处理数据:将解析后的数据显示在用户界面上,并进行必要的处理。通过这些步骤,QGC 能够实时接收和显示无人机的传感器数据,为用户提供全面的飞行状态信息。
软件著作权登记是保护软件开发者权益的重要步骤。通过了解软著申请的流程和注意事项,你可以更好地规划和管理自己的知识产权。无论是个人开发者还是企业,掌握软著申请的核心要点都将为你的创新之路提供有力支持。希望本文能帮助你顺利完成软著申请,获得应有的法律保护。
DeepSeek 是一款由中国团队开发的高性能大语言模型,具备强大的推理能力和对中文的深刻理解。它广泛应用于智能办公、教育辅助、编程开发、商业分析等领域,支持自然语言交互,用户无需复杂提示词即可获得高质量回答。

无人机的运动决策是指无人机在复杂环境中,根据当前的感知信息和历史记忆,决定下一步如何移动(例如前进、转向、避障等)。运动决策的目标是让无人机能够高效、安全地从起点导航到目标点,同时避免与障碍物碰撞。时间和空间注意力机制?首先是 注意力机制(Attention Mechanism),他是深度学习中的一种技术,能够帮助模型在处理复杂数据时,专注于最重要的信息。帮助无人机在视觉感知中,重点关注环境中的关