
写文章




- @qq_44642372
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
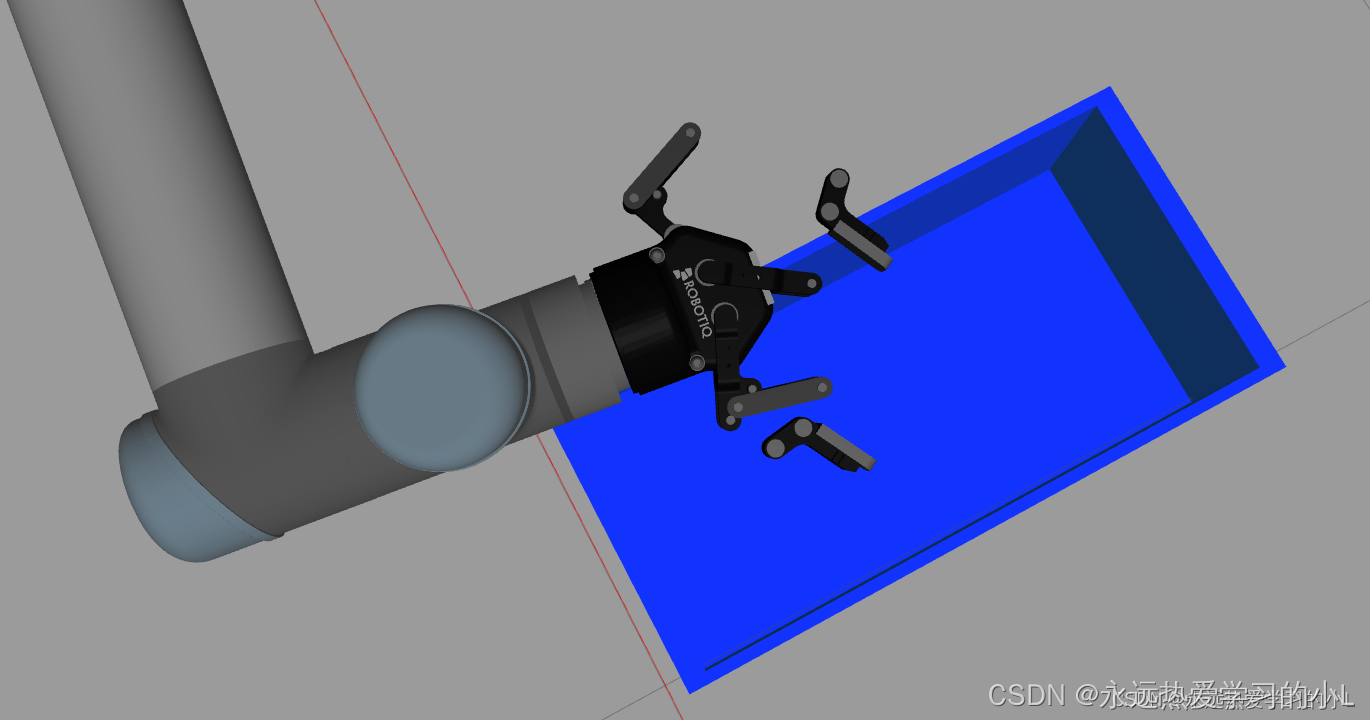
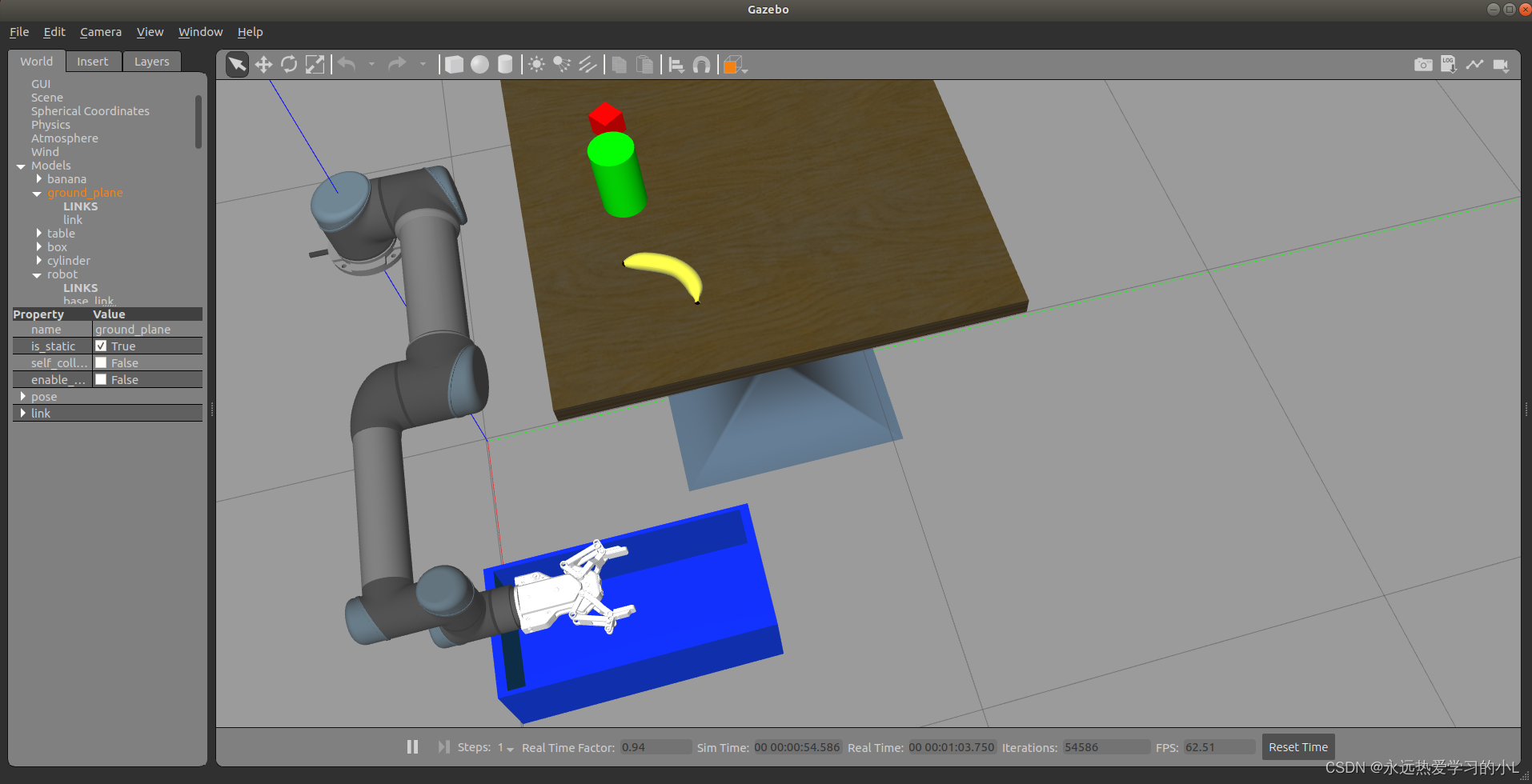
解决robotiq_85机械爪在gazebo中散架(关节解体)的问题
解决robotiq_85机械爪在gazebo中散架的问题1.配置夹爪方法2.插件下载3.编译1.配置夹爪方法这是我之前配置UR5+Robotiq85机械爪的文章https://blog.csdn.net/qq_44642372/article/details/123995916那时候遇到了机械爪在gazebo中仿真时会散架的问题,也就是机械爪的各个关节很快会相互分离:当时一直没找到原因,到后来编译
gazebo+rviz配置UR5+dh_gripper(大寰)夹爪最详细教程
UR5+dh_gripper在gazebo中配置1.urdf文件修改2.launch文件修改3.可能出现的问题之前配置过ur5+robotiq_gripper,但是在我的仿真中机械夹爪会散架,所以我把机械夹爪换成了这个。参考另一篇文章:https://blog.csdn.net/qq_44642372/article/details/123995916#t12dh_gripper功能包下载:htt
Gazebo插件Grasp_fix介绍与踩坑(识别不到物体,抓取时掉落)
Gazebo插件Grasp_fix介绍0.踩的坑1.Grasp_fix插件下载2.插件介绍一、如何使用二、各参数含义0.踩的坑在抓物体时,可能物体很小,只能用夹爪的前端的尖尖去抓,这样这个插件是很难检测到的,比如我一开始的这个物体就太薄了,不管怎么样设置插件的参数都抓不起来直到后来我换成了圆柱,突然发现能识别到物体了,才意识到物体的厚度问题,后来把这个长方体厚度加大,成功抓起来了可以考虑适当增加物
安装tensorflow时,protobuf requires Python ‘>=3.7‘ but the running Python is 2.7的解决方法
解决安装tensorflow时protobuf存在的问题
到底了